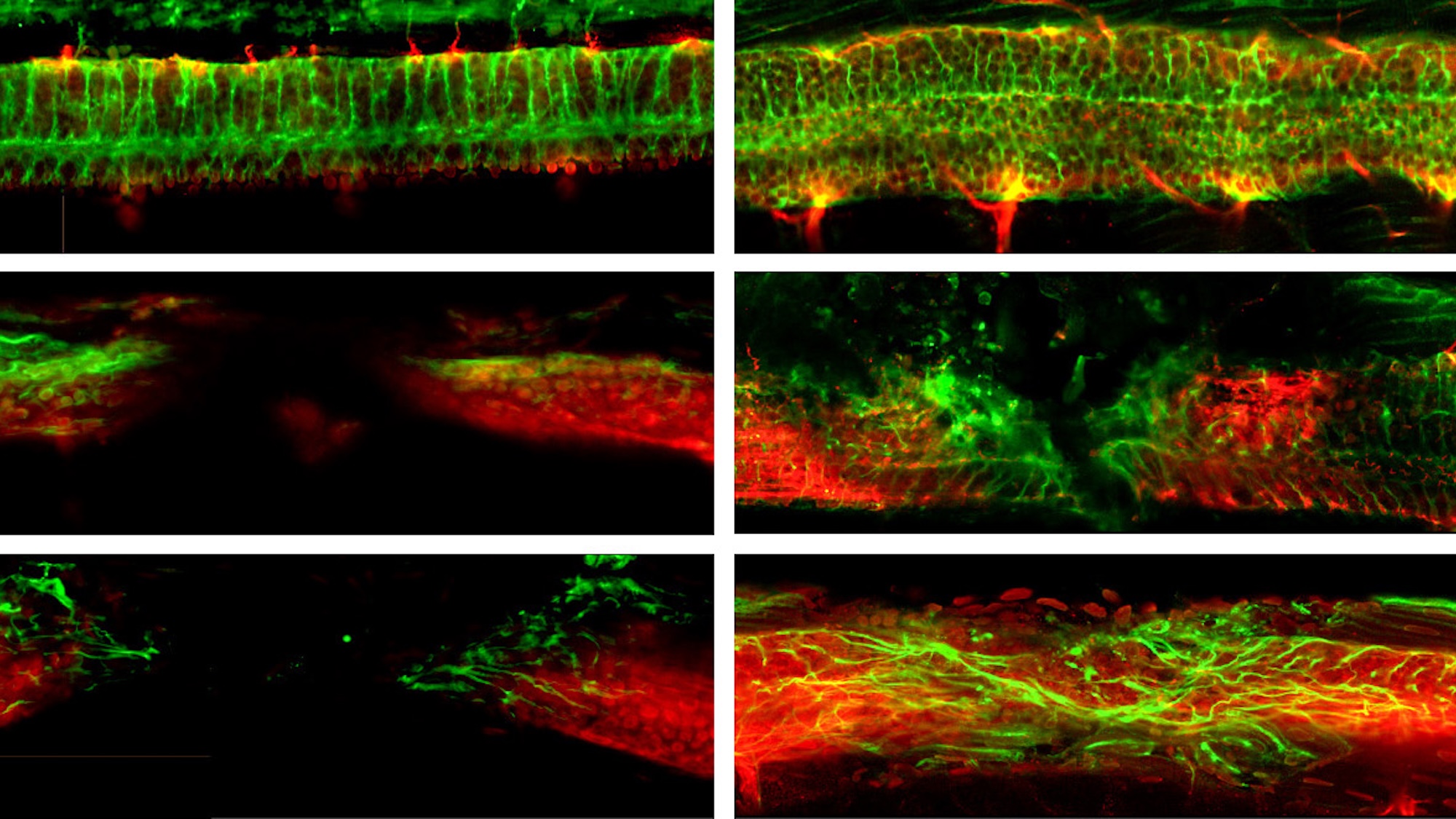
Despite significant medical advances, spinal cord damage remains one of the most difficult physical injuries to treat. Scarring frequently gets in the way of nerve fiber regrowth, while nerve cells usually cannot regenerate on their own. A possible solution? A fleet of stem cell-infused, injectable nanorobots that can help nerve cells regenerate. The tiny bots are detailed in a study recently published in the journal Nature Materials.
To build their new tools, a team at ETH Zurich in Switzerland engineered microscopic machines that combine living neural progenitor cells (NPCs)—specialized stem cells developed for the spine—with customized nanoparticles. These customized nanoparticles feature two layers—one that is sensitive to magnetic fields and another that translates them into electrical signals.
“We place a reservoir in the center where we trap the cells. Then we inject the nanoparticles and wait for the two components to bind,” Salvador Pané i Vidal, a study co-author and ETH Zurich roboticist, said in a statement.
Each nanorobot is about six micrometers wide, making them smaller than a red blood cell. However, the number of robots required to pull off a procedure is immense. Millions of nanobots are needed during animal trials. Even with such a high number, the initial experimental results are promising. In tests involving mice with severed spinal cords, nerve cells stimulated by the microrobots began reconnecting at the injury site within 28 days. By the end of the trial, the mice displayed major improvements in movement, gait, coordination, and exploratory behavior.
Significantly more research is required before these nanobots are ready for primetime, but the team hopes to one day begin testing similar devices in humans. Before that, they need to determine the most effective magnetic fields and how long to apply them to patients. In the meantime, the overall design could also be applied to help treat regenerative issues in organs and wounds.
“The reproducible and scalable production of microrobots using our lab-on-a-chip system demonstrates that the platform’s application potential extends beyond basic research,” added Pané i Vidal.
Modern autonomous vehicles are getting pretty darn good at seeing the world around them. That is, assuming that lighting conditions are ideal. Once rain, snow, or sudden bursts of bright light from first-response vehicles enter the equation, things start to get a bit dicey. A tiny new sensor component that is roughly the size of a grain of sand, could help solve that problem.
Called a photomemristor, the new sensor was engineered by researchers at Penn State. It breaks from the traditional approach to computer vision sensors, and instead takes inspiration from good old-fashioned human eyeballs. In essence, it is akin to extra artificial eyes. In testing, the device adjusted between bright and dark lighting environments faster than contemporary methods.
Human eyes easily and innately transition between light and dark. Building that same ability in future autonomous vehicles could make them more reliable, even in inclement weather. That extra help could go a long way, especially as robotaxi companies like Waymo and Zoox prepare to put more and more of their driverless cars on public roads in the United States and abroad. The findings were published this week in the journal Nature Communications.
“By mimicking the way the eye works, we can create photomemristors that work much more reliably for applications in mixed lighting environments,” Larry Chang, an engineer at Penn State and a study co-author, said in a statement.
Where computer vision falls short
Driverless car vision models (and all computer vision systems, for that matter) are only as good as the data that they’re trained on. Though there’s been considerable effort to improve performance in bad weather and odd lighting environments, a quick look at the cities where driverless services are currently available tells a familiar story. Phoenix, San Francisco, Austin all are known for their long, sunny days.
But weather isn’t the only factor that can trip up a computer’s vision. More specifically, those systems can struggle in what the researchers behind this new sensor call mixed lighting conditions. One example of mixed lighting is something most drivers are familiar with—driving down a long, hilly road in the dark, only to have a car pop up on the other side of the lane with its high beams on. That sudden jolt from darkness to the light of the other car’s headlights and back to dark again is disorienting, but most human drivers can manage it and still keep some awareness of their surroundings.
That’s more difficult for machines. In that same scenario, the team notes, a driverless car stunned by the flash of an oncoming high beam may briefly lose track of other figures in its vicinity. That could include the faint hue of a red stoplight or the blurry outline of a deer scurrying by.
Using rods and cones
To address that issue, the Penn State engineers went back to basics and looked at what makes the human eye work well in that scenario. Our eyes contain rods and cones that help distinguish details in the dark. When a light source suddenly gets brighter, the pigments in the rods get temporarily “bleached” and slowly regenerate. The cone cells, meanwhile, stay unchanged during that process, which is what helps us keep track of contrasting details while the rods readjust.
With that naturally occurring process as inspiration, the team set out to build a custom-made photomemristor meant to more or less copy the interplay between the rods and cones in human eyes. They built the sensor out of two materials, a stretchy, gel-like plastic and a powdery compound called titanium oxide, with water flowing between them. The titanium oxide captures light from the environment, which is then converted into an electrical current. That voltage is then passed through the plastic’s conductive surface. In practice, the plastic would absorb more water and slightly swell up in darker conditions, while exposure to more light would cause it to desorb water. The idea, the team notes, was to create eye-like sensors that can “dynamically adapt to changing light conditions.
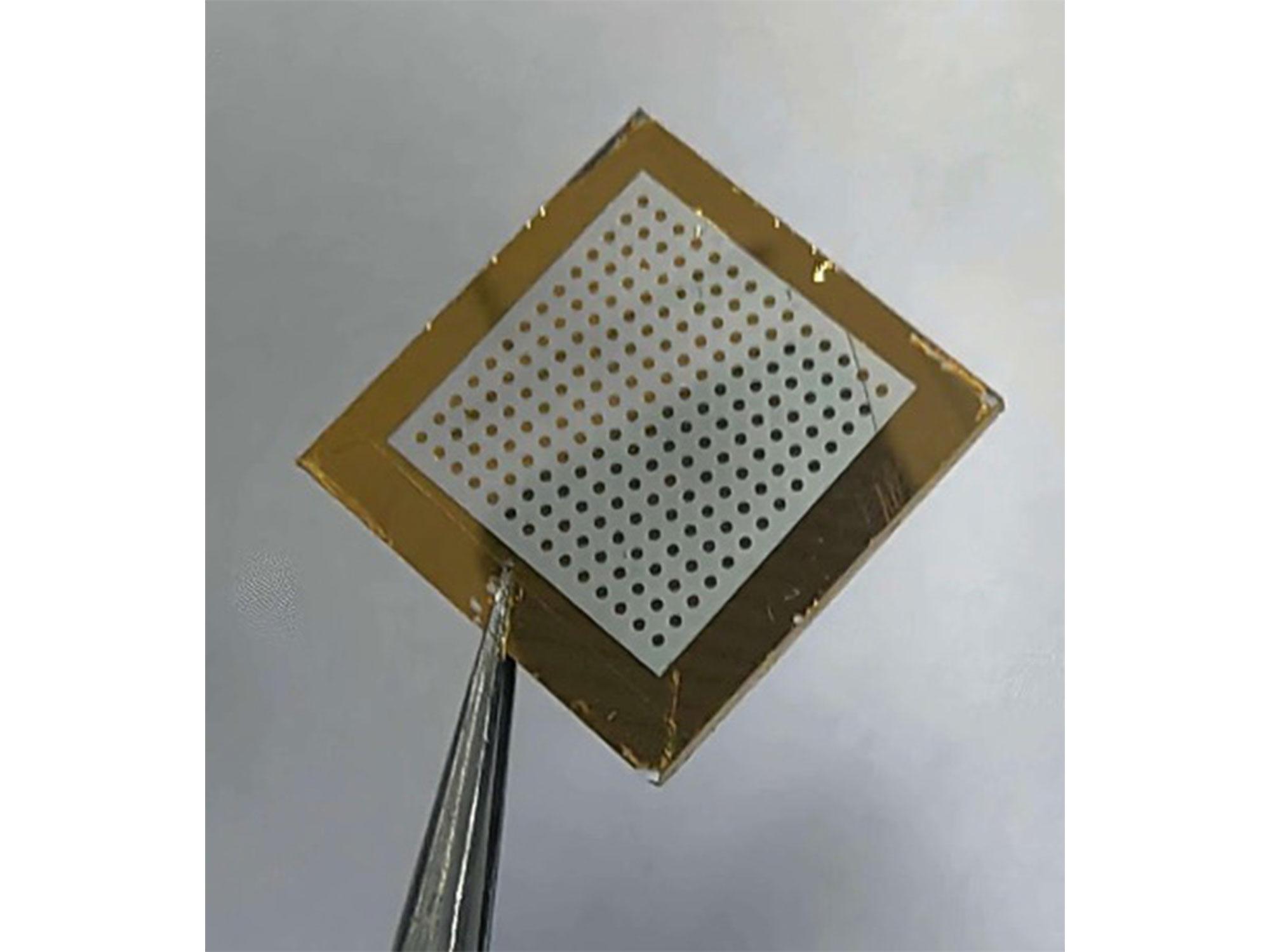
The team’s photomemristor is quite small, measuring only half a millimeter across. Despite its size, the component can convert light energy into electrical current to power advanced optical systems. Image: Provided by Jia Zhu. All Rights Reserved.
The device itself looks like a gold square, with a smaller square inside it and tiny holes dotted throughout. It’s also minuscule: one square measures just half a millimeter across, making it thinner than most credit cards. For this type of sensor to actually work in a computer vision system, several pieces would need to be connected to form arrays.
To test it, the team combined several of the sensors into a 4×4 array. The array was then paired with a neural network, which would act like the computerized brain in a driverless car or robot. Once combined, the team ran their new machine vision system through variations of a standard eye exam you might see at the optometrist. They placed an LED letter “F” against a background with lighting the team could control. The machine vision system, outfitted with the artificial eyes, had to keep track of and identify the F as the background switched from extremely bright to extremely dark.
After some initial training rounds, the system reported 95 percent accuracy in identifying the letter under mixed lighting conditions. That, the team said, outperformed traditional systems. While it still might not score quite as well as some humans on that test, it did have another leg up.Human eyes typically take somewhere between 20 and 30 minutes to fully adjust to major changes in light, but the team notes the system was able to adjust in a matter of seconds.
Seeing beyond cars
Though the artificial eyes worked well in this narrow test, including the sensors in actual cars you may see on the road is still a long way off. The team says the next step involves expanding the sensor set into a multimodal system capable of processing both visual and tactile data simultaneously. Eventually, though, they are hopeful this could help autonomous vehicles see a bit more reliably.
Beyond that, the team even thinks it’s possible a version of these artificial eyes could help create artificial optics that could provide renewed sight for visually impaired people. Those same eyes, they say, could also slot into humanoid robots to help them better navigate warehouses or other facilities where people normally work. That all sounds quite impressive, though it also starts sounding eerily similar to something out of the dystopian video game “Cyberpunk 2077.”
To effectively travel on Mars, rovers need to deal with a lot of sand. German engineers have created a new kind of ground rover that uses swimming motions to push through sand that may otherwise cause the wheels to get stuck. Its inspiration: the African sandfish (Scincus scincus), a lizard known for burrowing into the Sahara Desert and literally swimming through its sand like a fish. It’s one of the animal kingdom’s strangest methods of propulsion, but it may help shape the future of Mars exploration.
A video of the rover, released this week by the University of Würzburg, shows a mini-fridge-sized, silver rover making its way through a sandy, Martian-mimicking test floor. Rather than rolling forward, each of its four wheels cuts through the sand in what looks like a figure-eight motion. The rover pushes on several yards and then cuts a corner and returns to where it started.
“The wheels mimic the animal’s [sandfish’s]characteristic interaction with the ground, generating both longitudinal and lateral forces,” University of Würzburg researcher Amenosis Lopez said in a statement. “The rover leaves sinusoidal tracks in the sand.”
The sandfish: nature’s cute solution to slippery sand
Though most people likely associate space rovers with round wheels or tracks reminiscent of those on WALL-E, neither design is ideal for dealing with Mars’s uniquely harsh and sandy environment. Sand is unique because it’s a material with both solid and liquid-like qualities. On top of sand’s mixed texture, rovers roaming on the Red Planet have to deal with steep slopes and uneven terrain, where varying levels of slipperiness can cause imbalance. Patches of softer sand are also a nightmare for wheels, making the prospect of a rover getting stuck never far from mind
But nature figured out a solution to this issue millions of years ago, and it’s called the sandfish. Contrary to its name, the Sahara Desert native is a lizard in the skink family. Above ground, the sandfish uses its tiny legs to scrabble around much the same as any lizard. Things get more interesting when it burrows down into the sand. X-ray imaging shows the sandfish propelling itself forward under the sand, using a powerful waving motion to generate thrust and overcome drag. The result looks like an animal swimming through the sand, remarkably similarly to how a fish would oscillate its body to move through water
Engineers at Georgia Tech took those observations and used them to create their own sandfish robot in 2011. Testing with their robots showed that the little lizard’s oddly wedged shaped head may also help it generate lift forces and more easily swim through sand.
Sink or swim: new rover did both
Researchers working on the sandfish-inspired robot said it outperformed a wheeled version when navigating through a sandy test track. Where the round wheels would wobble and weave, the oscillating wheels stayed relatively stable. That’s not to say the new approach worked right out of the gate. Early models of the design were reportedly so heavy that the rover literally sank into the sand. The team went back to the drawing board and made a second version, this time increasing each wheel’s width and reducing overall mass
It’s unlikely these oddball new wheels will become the main chassis system for NASA rovers, at least not in the immediate future. More work still needs to be done to increase their overall controllability and account for slippage that can occur in complicated, real-world environments. There are also the added variables of accounting for scientific instruments and other cargo a rover might have to carry.
More than anything, the wheel design is a testament to the sandfish’s innate ingenuity and evolutionary gifts. Many scientists only recently began to truly appreciate these traits and what other technology they could inspire.
An intrepid sub-sea robot recently dove nearly 1.5 miles below the Mediterranean Sea off the coast of southern France. The remotely operated vehicle (ROV) went down to examine the wreckage of a merchant ship that dates back to the 16th century. There, it found hundreds of ornately decorated ceramics, jars, and jugs strewn across the sand. From the boat, a French navy sailor remotely controlling the robot plucked these treasures up ever so gently with the robot’s pincers. Despite centuries of ocean burial, the artifacts still maintained the bold blue and yellow geometric designs they had when the ship mysteriously capsized. But the ship’s discovery was mostly due to luck, and its current exploration is only made possible by modern advances in robotics.
Archaeologists are officially calling the site Camarat 4. It sits roughly 30 miles off the coast of Ramatuelle, but French authorities are keeping the exact location secret to prevent unauthorized visitors from nosing around. Camarat 4 was initially discovered during a routine French navy survey of the region last year, and the wreckage is now considered the deepest shipwreck in French territorial waters. The record for the deepest shipwreck ever found belongs to the USS Samuel B. Roberts. The navy vessel lies about four miles deep off the coast of the Philippines, according to the Guinness Book of World Records.
But reaching 1.5 miles isn’t a day at the beach either. To get down there and explore the mysterious vessel, archaeologists worked alongside the navy and reportedly used the largest robot in their arsenal.The robot is capable of diving down to 8,202 feet and was equipped with several cameras and a pair of pincers capable of grabbing objects. When the robot was deployed, it reportedly took a full hour just to reach the sea floor.
When it did, the cameras revealed the shipwreck in greater detail than ever before. They captured 66,974 images, snapping pictures at a rapid clip of eight photos per second. Those images clearly showed the ship’s six cannons, an anchor, and 12 cauldrons. Strewn across the seabed nearby were a small building’s worth of ceramics, one of which had the first three Greek letters of Jesus Christ’s name inscribed on it.
Archaeologists say that the cannons and the cargo reinforce the idea that this was a merchant ship. Though researchers have traced its origins to somewhere in northern Italy, it remains entirely unclear where its final destination was or what caused it to meet its watery grave.
All of the photos taken by the robot will help create a 3D model of the wreckage, which could aid further research. The robot was also able to grab and recover three pitchers and a plate from the site, though it’s unclear how many others may have been broken in the process. Using a modern robot’s giant pincers to grab nearly 500-year-old, decaying artisan works isn’t exactly a foolproof recovery method.
Exploring the sunken Italian ship isn’t just a matter of mere curiosity. Archaeologists involved in the excavation say that detailed historical records about Mediterranean merchant ships from this period are scarce. Knowing more about why this ship was there and where it was going could shed greater light on trade routes of the time.
Ironically, the sunken Italian ship’s sheer inaccessibility is also what makes it such a valuable site to explore. Its depth and remoteness mean it has been completely untouched by looters or previous explorers. Even so, modern humanity has managed to leave its mark on the ancient vessel in the form of garbage. Beer cans, plastic containers, and old fishing nets were all spotted near the cannons and ceramics.
Trash aside, the Camarat 4 expedition highlights the promise of future deep-sea exploration made possible by increasingly capable robotics, some of which are being designed to operate autonomously. By diving deeper than ever before, archaeologists will have the tools to explore mysteries that would otherwise have been left to rot in the ocean’s unforgiving darkness.
Though the 1949 series Fireside Theater and others are often credited with being the first successful anthology series, the format began to gain popularity with shows like The Twilight Zoneand The Outer Limits. These series feature separate standalone stories and characters that may be thematically connected and are typically based on the horror or sci-fi genres. Anthology shows are equally appealing to viewers who may not feel the need to commit to watching an entire series from beginning to end.
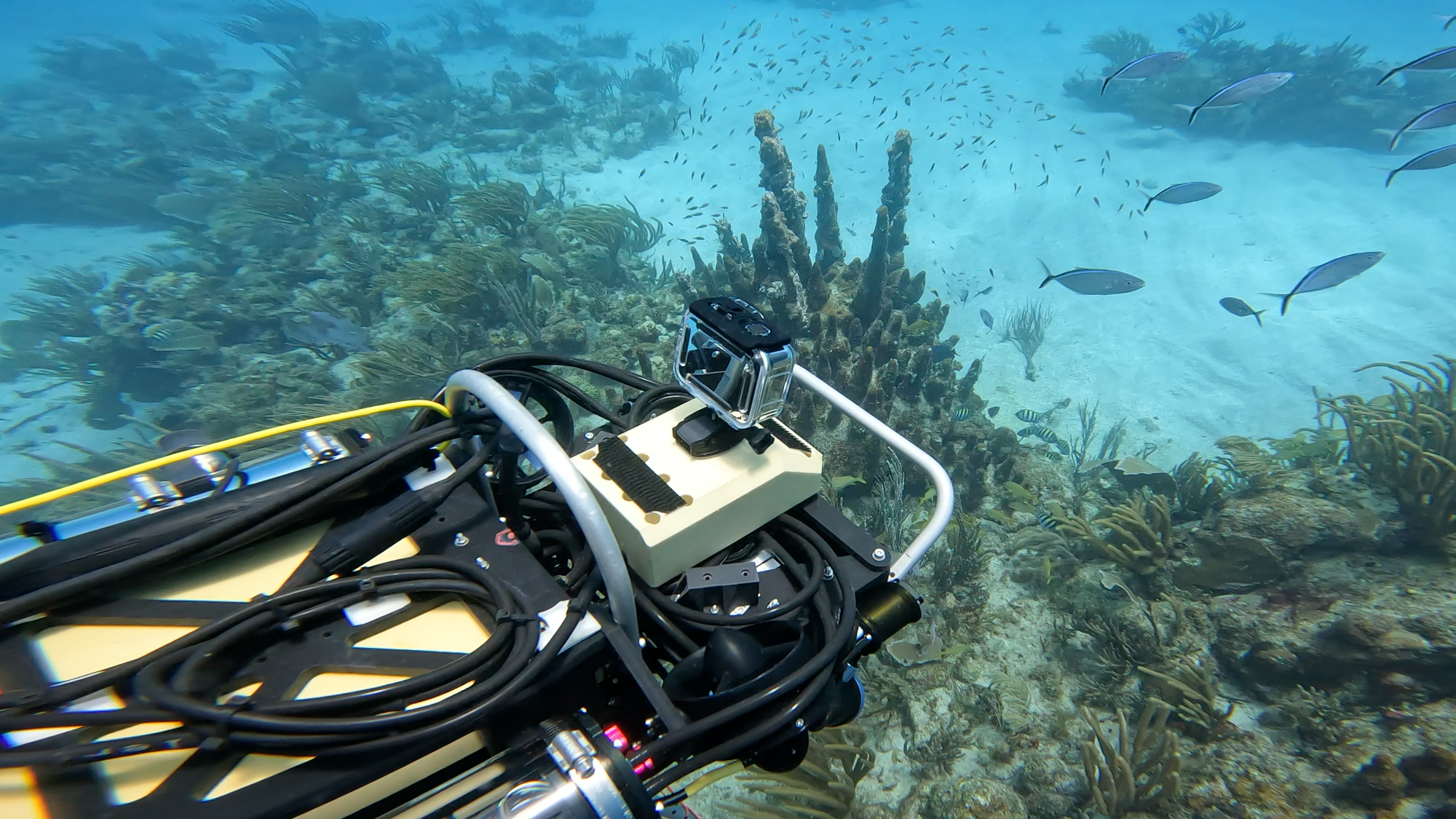
Coral reefs may soon have new swimming visitors observing their life-rich aquatic metropolises. But that visitor isn’t a fish—or even a human. It’s an autonomous, multi-sensor survey robot. Developed by the Woods Hole Oceanographic Institution (WHOI) Reef Solutions Initiative, this new underwater surveyor uses a combination of hydrophones, high-resolution cameras, and an onboard computer to find signs of marine life hotspots. It then moves in closer for a better look, creating data-rich maps that would likely take many human divers multiple trips to produce.
The system, appropriately called the Curious Underwater Robot for Ecosystem Exploration (CUREE), does all this all by itself. Well, that’s the goal, at least. In actual testing around Joel’s Shoal in the U.S. Virgin Islands, the curious robot was able to home in on the distant crackle of shrimp, and even tailed a barracuda for more than 984 feet. That last barracuda tracking bit required some human intervention to get it back on course, but the majority of the barracuda tracking occurred totally autonomously. The findings were published this week in the journal Science Robotics.
Keeping tabs on coral reef’s inhabitants
Coral reefs are like a busy neighborhood or bustling bar in the ocean. Though they account for less than 0.1 percent of physical ocean space, roughly a quarter of all marine species spend some part of their lives there. But overfishing, human development, and warming ocean temperatures are putting those bustling ecosystems at risk. Because of this threat, it’s more important than ever for marine biologists to have an accurate and timely sense of what those environments look like.
Getting a clear sense of what species are where in a reef isn’t simple, though. At any given time, most of a reef is barren, with marine life typically clumping into hotspots distributed throughout the reef. Currently, researchers primarily track those hotspots with trained human divers, though that approach isn’t perfect. Our pesky lungs and limited oxygen tanks mean human divers run on a short clock. It’s also costly for research teams to properly train and equip a human diver, which limits the amount of time and frequency with which they can take a plunge.
An underwater robot could potentially solve both those problems, but it would need the right tools for the job. That’s where CUREE comes in. Engineers outfitted the robot with a variety of sensors that can detect both visual and auditory signals. The system can analyze far-off audio signals in real time to hear distant noises as subtle as fish calling out to each other. It can then triangulate that data using an onboard computer system that moves toward areas it suspects have a high chance of containing marine life. If it spots life once there, it can then use its cameras to provide more precise data about the species and their behavior.
“In some sense, they’re almost a perfect compliment for each other,” WHOI roboticist Seth McCammon said of the multiple sensor method in a statement. “Passive acoustics gives you a broad sense of the environment, while vision is short range, but is this really information-rich data stream.”
Curious robot stalks a barracuda
The team put CUREE to the test near Joel’s Shoal, a coral reef located on the coast of St. John in the U.S. Virgin Islands. In one test, the robot could accurately find and count the number of fish in a region. It was able to detect signs of fish from up to 82 feet away and then use those clues to identify life hotspots.
However, the most interesting result was CUREE’s successful barracuda tracking. Once locked on to its target, CUREE followed the apex predator for a total of nine minutes and 55 seconds, as the fish weaved its way around, looking for lunch. The tracking video in the study shows the barracuda traveling first to a hotspot and then backtracking to another spot where it had previously startled a large reef snapper. And while a human diver had to initiate the robot’s lock on the barracuda,and had to re-lock on the target several times, CUREE did most of the work on its own. The team says eight minutes and 59 seconds of the tracking was done with full autonomy.
Though this isn’t the first underwater robot, its use of multiple sensor types makes it unique because it’s eventually a jack of all trades. Researchers can, in theory at least, drop the robot in a broad area of water and let it get to work surveying.
Fifteen-year-old Evan Budz was on a camping trip when he saw a snapping turtle that would become the impetus for an award-winning invention. As someone who loves hiking, canoeing, and just being outside, the Canadian high school student from Burlington, Ontario, had actively been looking for ways that he could go out and help the planet.
“My parents brought me up with the sort of principle that every place that I visit, I should leave it a bit better than I found it,” he says. So when Budz noticed the turtle swimming in some nearby waters, he knew that he’d found his next passion project: a bionic robot turtle that could help protect underwater environments.
How a turtle inspired an award-winning science project
“When I saw the snapping turtle, it was so graceful, fluidic, and generally non-disruptive” to its surroundings, says Budz. “I thought it’d be really interesting to go and try and replicate its natural swimming kinematics [basically the study of how things move]” in a robot.
Along with mimicking the fluid motions of a wild green sea turtle in the water, his autonomous device uses AI to monitor underwater ecosystems for ecological threats, such as invasive species and coral bleaching.
“Most current underwater technologies can produce things like noise from their propellers or very high-pressure water streams,” which can erode environments, he says.
However, by mimicking the motions of a sea turtle, Budz’s robot can move through the water innocuously, gathering vital data in a way that doesn’t stress marine life or damage delicate habitats. “I don’t want to harm the various places that I’m hoping to protect.”
High school student Evan Budz works on the flippers for his bionic turtle. Image: Evan Budz
How to build a robot turtle
To create his bionic turtle, Budz got to work studying the reptile’s locomotion. He watched videos of sea turtles swimming and talked with experts at his local aquarium, learning how the reptiles use their front flippers to propel themselves forward and their hind limbs for steering. He then used his 3D design and electronics know-how to plan a prototype in SolidWorks, a 3D Computer-Aided Design (CAD) and engineering software. From there, the high school student started creating his robot turtle’s 3D parts.
The robot has four flippers in total—with the larger front flippers providing its main propulsion and its smaller rear flippers used mainly for stability and changing direction, just like a real turtle. It also has a main acrylic tube “body” for housing its electronic components, which include a Raspberry Pi microcomputer. This runs AI models to detect environmental threats and records and transmits data. In addition, the bionic turtle navigates the water using various sensors. These include a GPS module for position tracking, allowing the robot to follow a predefined grid pattern.
Budz’s robot also has a front camera for “seeing” its surroundings, along with additional sensors on its exterior to help guide the autonomous reptile, offer depth control, and check for ecological hazards like microplastics and bleached coral.
Meet the Bionic Underwater Robotic Turtle, aka BURT
While not an official name, Budz has been calling his invention “BURT,” an acronym for “Bionic Underwater Robotic Turtle.” BURT maintains the same body-to-flipper-size proportions as a real-life sea turtle but is smaller overall, which allows it to move easily in different environments. It weighs about 11 pounds, though much of the robot’s weight is just added metal that allows it to sink down. This gives BURT an opportunity to monitor depths well below the water’s surface.
“To achieve neutral buoyancy in the water,” says Budz, “I needed the turtle to basically be heavier than the force of buoyancy that’s pushing it up.”
Budz did much of BURT’s testing in his grandparents’ backyard pool. Image: Evan Budz
BURT can swim for up to eight hours per charge on a lithium battery, though it also has a solar panel that can keep it going for even longer periods. Right now, Budz has BURT set up to swim at the typical speed of turtles (approximately 0.5 miles per hour). “If I do want it to swim faster, I can just change the flipper oscillation frequency,” meaning the rate of its flipper strokes.
Most of BURT’s testing has taken place in Budz’s grandparents’ backyard pool, which has a depth of just over eight feet.
“I basically went out and created a simulated coral reef setup using 3D models,” he says, programming the turtle to understand what coral bleaching and invasive species actually look like. “And the turtle then swims around them to simulate what it would do in a real-world environment.”
BURT is also set up to follow a predetermined search pattern, “so there’s no need for any sort of tether like you might find on a traditional underwater drone.” The bionic turtle scans its surrounding waters through its front-mounted camera, with all of the recorded data then feeding back into its Raspberry Pi microcomputer. According to the Budz’s testing, BURT has been able to detect replicated coral bleaching with 96 percent accuracy.
Budz tested BURT in Lake Ontario. Image: Evan Budz
BURT, the robot turtle, keeps getting smarter
Budz’s next step is to bring BURT into different environments to see how deep the robot can actually go. To deal with especially murky waters, he has installed lights on the front of the robot and added an ultrasonic transducer, which utilizes high-frequency sound waves to detect potential obstacles.
This year he’s even developed a new holographic imaging device, which he’s using to record the structural characteristics and shapes of tiny particles in waterways. He then uses a custom-trained neural network, which processes data in a way that’s similar to a human brain, to classify if each particle is a microplastic.
Although Budz built his robot as a labor of love, it’s since won some major awards, including first prize at the European Union Contest for Young Scientists, held in Latvia in 2025, and the Canada-Wide Science Fair, an annual science fair in which finalists qualify from approximately 25,000 competitors.
Budz’s goal is to have a fleet of these sea turtles that can be set out to detect ecological threats. “I’ve already looked at coral bleaching, invasive species, and microplastics,” he says, “but there are so many different places where this can be used.”
In The Workshop, Popular Science highlights the ingenious, delightful, and often surprising projects people build in their spare time. If you or someone you know is working on a hobbyist project that fits the bill, we’d love to hear about it—fill out this form to tell us more.
Farewell celebration includes giveaways to help fans look a little more like Gundam themselves.
We’re sadly down to the last few months before it’ll be time to say goodbye to Tokyo’s life-size Gundam statue. The 19.7-meter (64.6-foot) tall RX-0 Unicorn Gundam, which has been standing stalwartly outside the Diver City shopping center in the city’s Odaiba district, will be removed at the end of August, vacating the plaza it’s been located in since September of 2017.
But a special sendoff is planned, and part of the farewell celebration is a visual makeover courtesy of Hajime Katoki, the Unicorn Gundam’s original anime mecha designer. Katoki has created an array of decals which will be added to the statue for what’s being dubbed its RX-0 Unicorn Gunda, Ver. TWC Final form.
▼ RX-0 Unicorn Gunda, Ver. TWC Final preview images
Applying the decals is no doubt a more involved process than slapping some stickers on an ordinary plastic Gundam model, but they’ll be in place and ready for visitors to see starting June 20. The schedule has also been released for the final batch of regular nightly light-up sound and video shows, during which the statue’s coloring and head unit configurations often change.
● 7 p.m.: Mobile Suit Gunda, Hathaway’s Flash Special Movie-Hathaway Version
● 7:30 p.m.: MidNight Cha Cha
● 8 p.m.: Mobile Suit Gundam UC Special Movie Ver. 2.0 “Cage” SawanoHiroyuki[nZk]:Tielle
● 8:30 p.m.: Reproduction video Fly! Gundam 2017
● 9 p.m.: Mobile Suit Gundam UC Perfectibility
● 9:30 p.m.: Gundam Beyond
In addition, the Gundam Cafe Kitchen Car food truck, which sets up either next to the Unicorn Gundam or at the Diver City Tokyo Teleport-side entrance depending on the day, will be giving out Gundam headbands with each purchase in June, July, and August, so that you can have some Gundam crest flare of your own as you snap one last photo in front of the statue.
▼ Latte art coffees are just some of the themed food and drink items the Gundam Cafe Kitchen Car serves.
Other events to mark the end of the Unicorn Gundam’s time in Tokyo are also reportedly in the works, with further details to be announced at a later date. If you’ve got even a passing interest in Gundam, anime, robots, or awesome stuff in general, though, you’ll want to head on over to Odaiba while there’s still time to see it.
Beijing cleaner Lin Meiqiong found her work a little easier the day she was paired with an unlikely new colleague — a tall, wheeled robot with AI-powered tidying skills.
An X Square Robot carrying a bottle to a rubbish bin as a housekeeper cleans the floor at a customer’s home in Beijing on May 21, 2026. Photo: Wang Zhao/AFP.
The 56-year-old and her white-and-silver partner, fitted with cameras and two mechanical claws, are part of a new human-robot cleaning service offered by Chinese household help platform 58.com.
It’s a baby step towards a future espoused by tech evangelists in which robots increasingly take over manual labour from humans — though at the moment, such services are largely a data-gathering exercise for companies and a novelty for curious customers.
“It’s definitely different,” Lin told AFP in between cleaning the kitchen and wiping down windows.
“I used to have to do everything myself,” she said. “It’s reduced the workload a bit.”
The cleaning service, a collaboration between 58.com and Chinese robotics company X Square, costs 149 yuan (US$22) for three hours and is available in Beijing and tech hub Shenzhen.
Helped into the apartment by an X Square engineer, the AI-operated Quanta X1 Pro robot uses its cameras to identify areas it could spruce up.
As Lin scrubbed the floor on her knees, it picked up rubbish and folded clothes strewn across a sofa.
Grasping a pair of dark grey trousers, it raised its upper body to stretch the fabric taut, before laying it flat and arranging it into neat halves.
The process took several minutes and resembled a child learning to fold clothes for the first time.
Future iterations of the robot will respond to voice commands and even be able to chat, said the engineer, Hu Bowen.
‘Better than a lab’
Around 200 households have booked the service since it was rolled out in March.
Tan Pei, who works in advertising and booked the robot to clean her Beijing flat, said she had chosen the service because she was interested to “see what it could do”.
An X Square robot tidies up a flat. Photo: X Square Robot Overseas Markets, via YouTube.
“Even though it’s not that perfect, there are still parts of it that surprised me,” such as folding a pair of trousers “quite well”, she said.
China’s robots have wowed audiences with fluid dancing and set-piece martial arts displays onstage, but their application and performance in real-life settings remains limited.
For companies like X Square, the logic of launching an imperfect service lies in data collection for so-called embodied artificial intelligence.
Unlike large language models trained on vast quantities of internet content, robots lack comparable real-world datasets.
“We don’t have a robot internet yet,” Christoforos Mavrogiannis from the University of Michigan told AFP.
“It is much more informative to put the robot out there and study what happens than staying forever in the lab.”
X Square engineer Hu said he sends his robots to work in a “completely unfamiliar environment”.
“That is very challenging, but this unfamiliar data is also very helpful for the robot’s growth.”
As investment into embodied AI booms, similar trials in China include robots directing traffic in cities like Hangzhou or working on factory floors.
On the domestic help front, firm GigaAI also plans to deploy 100 humanoid robots into households in central Wuhan this autumn for free home-service trials.
Investors have poured more than 57.7 billion yuan (US$8.5 billion) into China’s embodied AI industry so far this year, already soaring past the total for last year as a whole, according to business database ITjuzi.
‘Very elementary stage’
But a myriad of hurdles stand in the way of widespread deployment.
Engineers train humanoid robots to do household tasks at the X Square Robot facilities in Shenzhen, southern China’s Guangdong province, on May 22, 2026. Photo: Hector Retamal/AFP.
As the Quanta X1 Pro’s clothes folding demonstrated, robots still can’t match human dexterity.
“Even though many companies are working on building better hands and building autonomy for hands, we don’t have that yet,” the University of Michigan’s Mavrogiannis said.
There are multiple regulatory issues even once the physical capability is there.
Privacy will become a big issue, as robots would have access to huge amounts of personal data.
“We don’t know where that data is going, where it’s located… who is looking at that information,” said Valeria Alessandra Macalupu Chira from Queensland University of Technology.
The safety of clients and their homes is another unresolved issue.
“I think we are still at a very elementary stage,” said Yang Jianfei from Singapore’s Nanyang Technological University.
Robots currently require supervision by humans who can activate emergency stop functions, he noted, and there are not yet recognised industry-wide safety standards.
Experts agree broad adoption seems a long way off.
Asked whether she thought robots would revolutionise her industry, cleaner Lin did not seem too concerned.
“Compared with people, it’s obviously still not quite there,” she said. “After all, it’s a robot.”
Seeing Tokyo’s life-size Gundam statue is an amazing experience, but also surreal one. Sure, Japan is the land of anime and all, but even then, a 19.7-meter (64.6-foot) tall mecha feels like something too awesome to be standing outside of the Diver City entertainment complex in the Odaiba district.
And sadly, it’s not going to be standing there much longer.
Both the official Gundam franchise website and the site for Tokyo’s life-size Unicorn Gundam statue have posted notices that the 1:1-scale recreation of the RX-0 Unicorn Gundam will be removed. They’re not giving fans much advance notice to make one last visit either (or one first visit, if you haven’t been able to fit Tokyo into your travel plans yet), as the Unicorn Gundam will be gone at “the end of August.”
It’s a sad turn of events for what has become both a symbol of the neighborhood and a mecha mecca for anime fans from around the globe. The Unicorn Gundam was completed in September of 2017, meaning that it won’t quite make it to a full 9 years. I went to go see the big guy as soon as I could, and on my most recent visit just this month, the Unicorn was still looking great, as you can see in the photos in this article.
Gundam rights-holder Bandai hasn’t said why the Unicorn Gundam is being removed, and with it still drawing huge crowds, to the statue itself and to the two Gundam specialty stores inside Diver City, the decision comes as a shock to many fans.
The blow of the Unicorn Gundam’s departure is softened by Bandai’s promise that it will be starting a project it calls the “Gundam Landmark Concept,” creating a new Gundam facility/attraction that “fans from all over the world will want to come visit.” No further details have been released yet, but with Yokohama’s moving life-size Gundam having been sent off in the spring of 2024 to Osaka for the Expo 2025 world’s fair, the removal of the Unicorn Gundam will leave the Tokyo area with no life-size Gundams at all.
That seems like a vacuum Bandai would want to fill as quickly as it can, and this actually isn’t the first time for Odaiba to lose a life-size Gundam, either. Prior to the Unicorn Gundam’s installation, a life-size version of the original RX-78-2 Gundam stood in the same spot for several years, until it was removed in March of 2017, followed by a Gundam-less period of roughly six months before the Unicorn Gundam, was completed.
So hopefully this doesn’t mean Tokyo will be saying goodbye for good to Gundam so much as goodbye to this particular Gundam, and then hello to a new one. Still, there’s been no official word that a replacement mecha is one the way, and while Bandai says it will have special events to send the Unicorn Gundam off in style, there’s very little time to waste if you want to see it.
Being a mecha anime, Gundam is very focused on the future. As a matter of fact, it’s so focused on the future that the franchise has made up multiple “Century” and “Era” names for its timelines, freeing it from the need to align its narratives with real-world history as its characters head out into space.
That doesn’t mean that the anime’s mobile suits can’t combine beautifully with traditional earthbound aesthetics, though, and as proof Gundam is partnering with a Fukushima craftworks company that’s roughly 300 years old.
Fukushima Prefecture’s Shirakawa Daruma Sohonpo is one of those companies that’s been around for so long it can’t seem to pin down the exact year in which it was founded, but we know it was about three centuries ago. Now under the guidance of its 14th owner, Shirakawa Daruma Sohonpo’s artisans continue to carve and paint each and every one of their daruma dolls by hand, including their new ones based on Mobile Suit Gundam Seed’s ZGMF-X10A Freedom Gundam…
…and the ZGMF-X10A Freedom Gundam.
Daruma are made in many places in Japan, but the ones from the town of Shirakawa, where Shirakawa Daruma Sohonpo’s workshop is located, are especially prized. Because Fukushima has heavy snow in the winter, farmers had long periods when they couldn’t work their fields and had to stay indoors. With all that time on their hands, many families spent it honing their artistic skills, with some becoming such proficient craftsmen that they raised the bar for daruma quality in the community to a point where now the whole country recognizes them as among the very best.
Daruma dolls are considered auspicious signs of impending success, and ordinarily you’re supposed to paint in the pupil of one eye when you purchase or receive the doll, make a wish, and then paint in the other pupil when it comes true (or state your goal and paint in the other pupil when you achieve it, if you’re more existentially minded). Since Gundams don’t have pupils to begin with, that’s technically something you can do with these too, though that’d probably end up making them look a little closer to the super-deformed SD Gundam spinoffs than the original ZGMF-X10A and ZGMF-X10A.
The Gundam daruma come in two sizes, 15 and 8.5 centimeters (5.9 and 3.3 inches), with the larger ones priced at 4,950 yen (US$32) and the smaller ones at 3,300 yen. They’re also available in a set that gets you both mobile suit daruma (9,900 yen for the big ones and 6,600 yen for the smaller versions) plus a snazzy wooden box.
The Gundam daruma officially go on sale until August 1. Preorders are open now though through the Premium Bandai website here, giving us a way to secure a Gundam of our own to help cope with the anxiety about Tokyo being about to lose its life-sized Gundam statue.
It seems like every week there’s another example of a new robot modeled after a real creature in the animal kingdom. From dogs and bats, to roaches and desert lizards, the natural world is a constant source of inspiration for engineers. But while most robotics researchers use animals as a base for their machine’s movement, an ambitious team of Duke University engineers set out to make something entirely new: a robot whose form factor and movement aren’t derived from biology, but from the universe’s underlying physics.
Say hello to Argus, a 20-legged, blob-looking robot capable of seeing in all directions at the same time and able to move almost instantly in any direction. The amorphous-looking sphere has no top or bottom, no left or right, and will keep trekking through sand, dirt, and gravel even when some of its legs are destroyed. It can also use its many legs to shimmy up narrow walls, a move similar to a wall jump in “Super Mario.”
The engineers behind Argus say their intriguing, if not slightly terrifying, creation isn’t just another incremental step forward in robotics. It’s the first member of a totally new category of “dynamically symmetric machines.” The findings were published this week in the journal Science Robotics.
“Watching Argus move is unlike watching any other robot we’ve worked with,” study co-author and Duke PhD student Jiaxun Liu said in a statement . “The first time we saw it navigate among trees and rough terrain, even under heavy collisions, we knew this was something different.”
Biological tradeoffs
Though somewhat human-looking, upright bipedal robots from companies like Figure and Tesla are all the rage these days, engineers have long looked to other animals to inspire their machines, because animals are simply better than Homo sapiens at certain tasks. Dogs and other quadrupeds are more agile, bats can fly, and bugs can scurry into hard-to-reach places.
However, at least in terms of movement, each of the pluses of these specific animals has also come with some minuses. Dogs and other quadrupeds are remarkably fast and nimble when moving forwards, but ask them to replicate that movement when moving backwards and you’re in for a problem.
With those inherent biological tradeoffs in mind, the team at Duke’s General Robotics Lab set out to make something completely different. Taking inspiration from underlying physics, they wanted to see if they could make a robot based around “dynamic symmetry,” which they define as the ability to generate forces and acceleration with uniform magnitude in all directions.
In other words, such a robot would take the idea of left or right and up and down and throw them out the window. Instead, it would be capable of moving in any direction, at any time, without any privilege given to one particular direction. The goal was essentially to build possibly the world’s first “omnidirectional” robot.
Argus keeps on coming—even when you break its legs
The design team eventually settled on a spherical core, or base, with a bunch of legs sticking out of it. They made multiple versions in a simulation, one with as few as eight legs and another with as many as 40. Eventually they settled on an even 20 legs for the physical build. Each of those legs is tipped with a camera that serves as one of Argus’ many eyes. Fitting, then, that it’s named after a many-eyed giant in Greek mythology. The researchers describe Argus as visually similar to a sea urchin, but even that’s selling it short. It doesn’t really look like anything in nature, which makes its uncanny movement in real-world testing all the more unsettling.
In testing, Argus could move in any direction just as quickly and comfortably as any other. The upside of that is that the blob is actually quite adaptable to different terrain despite its unusual appearance. It can easily traverse forest, wet surfaces, and sand, and could climb over certain obstacles. Argus’ ability to rapidly redistribute its weight also meant that it excelled at recovering when researchers tried to shove it off course. While Argus isn’t the first robot to right itself after getting pummeled by a researcher, what makes it unique is that it can redistribute its weight even if some of its legs get damaged or fail altogether.
In other words, you can chop off Argus’ legs and it will just keep coming.
Argus joins a family of DARPA-backed robots
The Duke researchers frame their interest in building this new category of machine as primarily motivated by pushing the boundaries of what’s possible in mechanical science. Still, it’s hard not to ignore the researchers’ most notable funder: the Pentagon’s Defense Advanced Research Projects Agency. Known for incubating some of the military’s most notorious research and development projects, DARPA is responsible for everything from Boston Dynamics’ beef Atlas humanoid to a massive, experimental manta ray inspired uncrewed underwater vehicle.
So, while it’s still not clear what exactly Argus will ever be used for, paper coauthor and postdoctoral researcher at Duke’s General Robotics Lab Boxi Xia says the experimentation and exploration was success in itself.
“Argus is an existence proof,” Xia said in a statement. “It shows that designing for dynamic symmetry isn’t just a theoretical curiosity. It produces a robot you can deploy in the wild, on uneven ground and in clutter, even in low-gravity settings. It changes what’s possible.”