A 31-year-old New York native named Kelsey Pfendler is one week into her audacious quest to become the youngest woman to row unassisted from California to Hawaii. To complete her over 2,400-mile journey, she will need to face stormy seas and traverse waters teeming with all types of ocean life. If she succeeds, Pfendler will become the first American woman ever to do so.
A couple hours of napping and some food will make you feel like a new woman! Waves and wind are still big, but luckily they are becoming more favorable, allowing Kelsey’s boat to catch and ride the waves. Kelsey is rowing to raise funds for The Whale Foundation an organization whose mission is to support, restore, and celebrate the health and well-being of the Grand Canyon river guiding community. Links to learn more and donate are in our bio. @Concept2 @Recpak @insta360 official
Pfendler set off from Monterey, California on May 21 and has been posting daily updates on her TikTok. A separate live tracker also plots her position on a digital map. As of May 28, the tracker shows her off the Southern California coast, moving at 1.6 knots. The multi-month voyage is a major test of physical strength and mental fortitude, and it’s already proven grueling. In just her first week, Pfendler battled strong headwinds as she pushed away from the California coast, leaving her hands covered in blisters.
Absolutely flying today! Waves are around 14ft and wind maxed about 22mph earlier, which gave her a good boost of speed. 229 miles so far, about 2,000 to go. @Concept2 @Recpak
And it has only gotten tougher. Pfendler’s route took her directly into the path of a weather front, bringing bone-chilling temperatures and punishing waves. Worse, while taking cover from the waves, she lost the cap to her heavy-duty freshwater bag. Though she has the ability to make more freshwater with a desalination device, it runs on solar power and the storm left the skies too dark and overcast for the device to work. As a result, Pfendler has had to tap into her emergency supply of 25 small water bottles, a scarcity that has also prevented her from using water to rehydrate her freeze-dried camp food.
“It’s tortillas and peanut butter until I get some sun,” Pfendler said.
But the trip has had its lighter moments as well. Pfendler posted an update sharing her excitement when she crossed the continental shelf. At about 50 to 60 miles off the California coast, crossing the continental shelf is something few humans get to experience so intimately. She also recounted a moment where she spotted either a sea lion or a dolphin hunting fish nearby, sending them leaping out of the water all around her boat.
“It was really cool, it was in the dark and it was kinda special for me,” Pfendler said,
This quest isn’t Pfendler’s first rodeo. She completed a similar rowing trip from California to Hawaii in 2024 with three companions, serving as the skipper. That trip took 40 days, 22 hours, and 14 minutes. Still, rowing in total isolation—even for an experienced oarswoman—adds another layer of challenge. If Pfendler completes the trip, she will be just the third woman ever to do so. The record, set by British rower Lia Ditton in 2020, currently stands at 86 days, 10 hours, and 56 seconds.
To effectively travel on Mars, rovers need to deal with a lot of sand. German engineers have created a new kind of ground rover that uses swimming motions to push through sand that may otherwise cause the wheels to get stuck. Its inspiration: the African sandfish (Scincus scincus), a lizard known for burrowing into the Sahara Desert and literally swimming through its sand like a fish. It’s one of the animal kingdom’s strangest methods of propulsion, but it may help shape the future of Mars exploration.
A video of the rover, released this week by the University of Würzburg, shows a mini-fridge-sized, silver rover making its way through a sandy, Martian-mimicking test floor. Rather than rolling forward, each of its four wheels cuts through the sand in what looks like a figure-eight motion. The rover pushes on several yards and then cuts a corner and returns to where it started.
“The wheels mimic the animal’s [sandfish’s]characteristic interaction with the ground, generating both longitudinal and lateral forces,” University of Würzburg researcher Amenosis Lopez said in a statement. “The rover leaves sinusoidal tracks in the sand.”
The sandfish: nature’s cute solution to slippery sand
Though most people likely associate space rovers with round wheels or tracks reminiscent of those on WALL-E, neither design is ideal for dealing with Mars’s uniquely harsh and sandy environment. Sand is unique because it’s a material with both solid and liquid-like qualities. On top of sand’s mixed texture, rovers roaming on the Red Planet have to deal with steep slopes and uneven terrain, where varying levels of slipperiness can cause imbalance. Patches of softer sand are also a nightmare for wheels, making the prospect of a rover getting stuck never far from mind
But nature figured out a solution to this issue millions of years ago, and it’s called the sandfish. Contrary to its name, the Sahara Desert native is a lizard in the skink family. Above ground, the sandfish uses its tiny legs to scrabble around much the same as any lizard. Things get more interesting when it burrows down into the sand. X-ray imaging shows the sandfish propelling itself forward under the sand, using a powerful waving motion to generate thrust and overcome drag. The result looks like an animal swimming through the sand, remarkably similarly to how a fish would oscillate its body to move through water
Engineers at Georgia Tech took those observations and used them to create their own sandfish robot in 2011. Testing with their robots showed that the little lizard’s oddly wedged shaped head may also help it generate lift forces and more easily swim through sand.
Sink or swim: new rover did both
Researchers working on the sandfish-inspired robot said it outperformed a wheeled version when navigating through a sandy test track. Where the round wheels would wobble and weave, the oscillating wheels stayed relatively stable. That’s not to say the new approach worked right out of the gate. Early models of the design were reportedly so heavy that the rover literally sank into the sand. The team went back to the drawing board and made a second version, this time increasing each wheel’s width and reducing overall mass
It’s unlikely these oddball new wheels will become the main chassis system for NASA rovers, at least not in the immediate future. More work still needs to be done to increase their overall controllability and account for slippage that can occur in complicated, real-world environments. There are also the added variables of accounting for scientific instruments and other cargo a rover might have to carry.
More than anything, the wheel design is a testament to the sandfish’s innate ingenuity and evolutionary gifts. Many scientists only recently began to truly appreciate these traits and what other technology they could inspire.
NASA’s ambitious plan to put humans on the moon may hinge on the bathroom habits of a handful of University of North Dakota grad students. In the name of science, those researchers will test the limits of a mobile wastewater treatment system designed to convert human waste into plant nutrients and other sustainable materials. The trial will serve as a stress test of sorts, measuring how well the Divergent Deployable Wastewater Treatment Facility holds up to regular use and heavy loads in an environment designed to mirror a lunar habitat.
It’s not pretty work, but someone has to do it.
“The tests will help NASA evaluate real-world operation, crew training needs, system reliability, and how wastewater simulants compare with actual human metabolic waste in an analog mission environment,” Ali Alshami, University of North Dakota Chemical Engineering professor and test participant, said in a statement.
The unassuming gray building could one day be an astronaut wastewater facility. Technicians prepared the Divergent Deployable Wastewater Treatment Facility for transport at NASA’s Kennedy Space Center in Florida on April 21, 2026. Image: NASA/Kim Shiflett
Treated astronaut poop will feed lunar plants
The mobile facility consists of three separate bioreactors, each tasked with handling a specific kind of waste. Feces, urine, and food waste are treated separately because each material contains different levels of salts, solids, carbon, nitrogen, and phosphorus. One reactor processes feces and food waste, converting it into nutrient-rich water that can feed plants. The other two handle urine and greywater from activities like showering and laundry, some of which can be filtered and recycled into clean drinking water. From an astronauts’ perspective, the experience should feel pretty familiar to life onboard the International Space Station (ISS). They use the toilet as normal, and it automatically diverts waste at the source, routing each type to its corresponding bioreactor.
The whole process takes place in a mobile, 8.5-by-24-foot trailer. In addition to the bioreactors, the unit also houses a vertical garden maintained by the converted wastewater. The goal is to kill two birds with one stone: process waste efficiently and then use it to sustain lunar agriculture. Both are essential if astronauts want any shot at building longer-term habitats on the moon or even Mars. To that end, NASA has ambitions to start constructing a semi-permanent lunar structure or “moon base” by 2029.
Where no one has gone before
Waste management in space has come a long way since the first moon missions. Back in the 1960s, NASA Apollo astronauts left behind 96 bags of human waste (filled with poop, urine, and vomit) on the lunar surface to save weight. Those bags are almost certainly still there.
Thankfully, decades of research mean astronauts no longer have to relieve themselves into a bag, at least not most of the time. The most recent Artemis mission featured a fully functional space toilet, though it malfunctioned almost immediately after liftoff.
Recycling wastewater has also seen major improvements. NASA had a breakthrough in 2023 when its life support system aboard the ISS managed to recover nearly 98 percent of all breath, sweater, and urine brought aboard by the crew. Future astronauts on prolonged spacewalks may also wear this Dune-inspired backpack that filters urine and sweat into drinking water in a single self-contained loop.
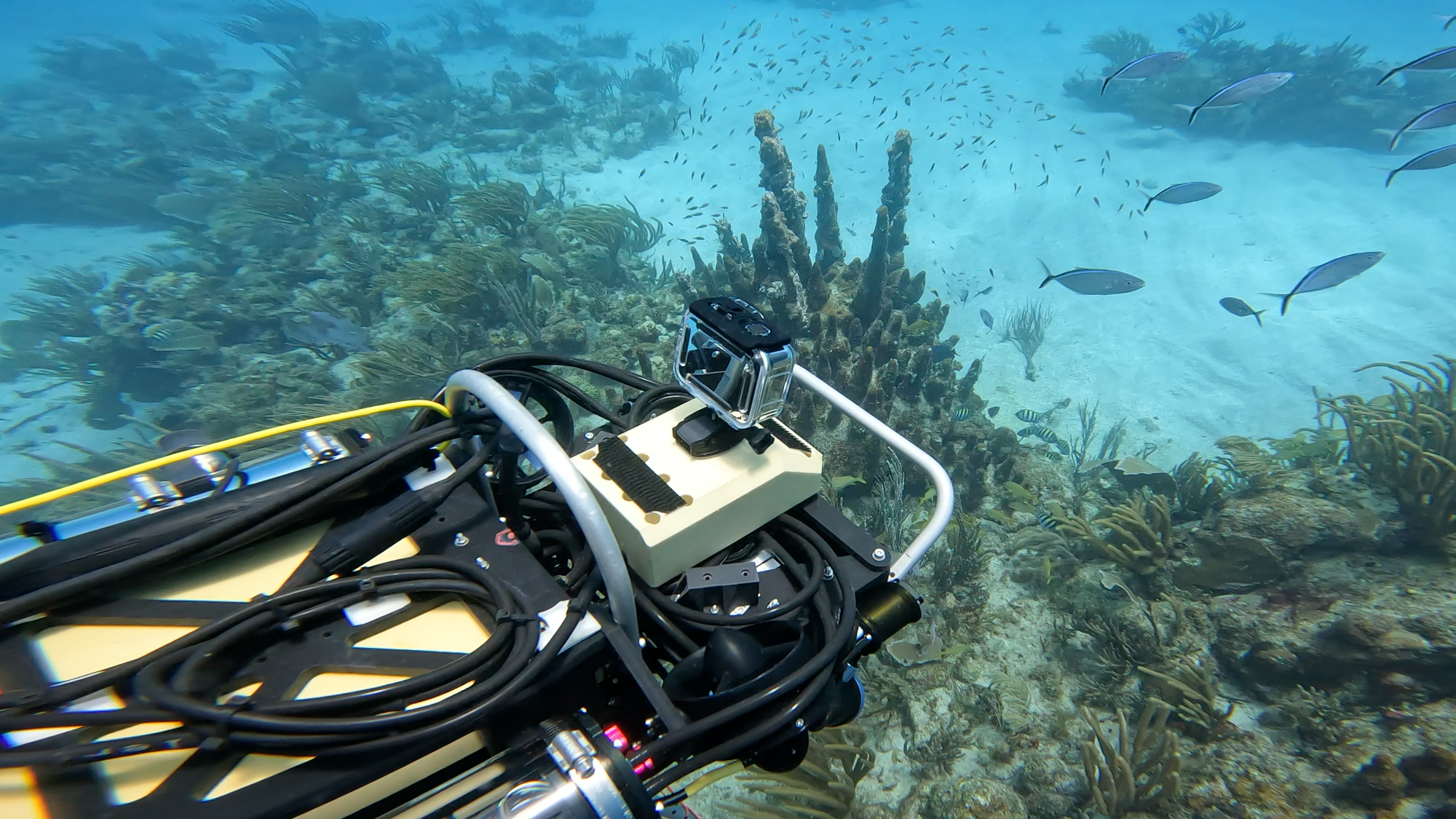
Coral reefs may soon have new swimming visitors observing their life-rich aquatic metropolises. But that visitor isn’t a fish—or even a human. It’s an autonomous, multi-sensor survey robot. Developed by the Woods Hole Oceanographic Institution (WHOI) Reef Solutions Initiative, this new underwater surveyor uses a combination of hydrophones, high-resolution cameras, and an onboard computer to find signs of marine life hotspots. It then moves in closer for a better look, creating data-rich maps that would likely take many human divers multiple trips to produce.
The system, appropriately called the Curious Underwater Robot for Ecosystem Exploration (CUREE), does all this all by itself. Well, that’s the goal, at least. In actual testing around Joel’s Shoal in the U.S. Virgin Islands, the curious robot was able to home in on the distant crackle of shrimp, and even tailed a barracuda for more than 984 feet. That last barracuda tracking bit required some human intervention to get it back on course, but the majority of the barracuda tracking occurred totally autonomously. The findings were published this week in the journal Science Robotics.
Keeping tabs on coral reef’s inhabitants
Coral reefs are like a busy neighborhood or bustling bar in the ocean. Though they account for less than 0.1 percent of physical ocean space, roughly a quarter of all marine species spend some part of their lives there. But overfishing, human development, and warming ocean temperatures are putting those bustling ecosystems at risk. Because of this threat, it’s more important than ever for marine biologists to have an accurate and timely sense of what those environments look like.
Getting a clear sense of what species are where in a reef isn’t simple, though. At any given time, most of a reef is barren, with marine life typically clumping into hotspots distributed throughout the reef. Currently, researchers primarily track those hotspots with trained human divers, though that approach isn’t perfect. Our pesky lungs and limited oxygen tanks mean human divers run on a short clock. It’s also costly for research teams to properly train and equip a human diver, which limits the amount of time and frequency with which they can take a plunge.
An underwater robot could potentially solve both those problems, but it would need the right tools for the job. That’s where CUREE comes in. Engineers outfitted the robot with a variety of sensors that can detect both visual and auditory signals. The system can analyze far-off audio signals in real time to hear distant noises as subtle as fish calling out to each other. It can then triangulate that data using an onboard computer system that moves toward areas it suspects have a high chance of containing marine life. If it spots life once there, it can then use its cameras to provide more precise data about the species and their behavior.
“In some sense, they’re almost a perfect compliment for each other,” WHOI roboticist Seth McCammon said of the multiple sensor method in a statement. “Passive acoustics gives you a broad sense of the environment, while vision is short range, but is this really information-rich data stream.”
Curious robot stalks a barracuda
The team put CUREE to the test near Joel’s Shoal, a coral reef located on the coast of St. John in the U.S. Virgin Islands. In one test, the robot could accurately find and count the number of fish in a region. It was able to detect signs of fish from up to 82 feet away and then use those clues to identify life hotspots.
However, the most interesting result was CUREE’s successful barracuda tracking. Once locked on to its target, CUREE followed the apex predator for a total of nine minutes and 55 seconds, as the fish weaved its way around, looking for lunch. The tracking video in the study shows the barracuda traveling first to a hotspot and then backtracking to another spot where it had previously startled a large reef snapper. And while a human diver had to initiate the robot’s lock on the barracuda,and had to re-lock on the target several times, CUREE did most of the work on its own. The team says eight minutes and 59 seconds of the tracking was done with full autonomy.
Though this isn’t the first underwater robot, its use of multiple sensor types makes it unique because it’s eventually a jack of all trades. Researchers can, in theory at least, drop the robot in a broad area of water and let it get to work surveying.
Popular YouTuber and aircraft enthusiast Ramy RC built and flew what he’s calling the world’s largest remote-controlled (RC) version of a Boeing 777-9X jet. It’s not just big for an RC toy, it’s big, period.
With a wingspan of 33 feet and weighing 630 pounds, it’s roughly the same size as a human-piloted Cessna 150. The RC Boeing 777-9X may look identical to the real aircraft on the outside, but the plane is made mostly out of CNC-milled foam and carbon fiber. It has five actuators controlling the flaps, working landing gear, and is fully electric. In testing, the behemoth was able to taxi around a tarmac, lift off, and land several times.
Ramy has made a bit of a name for himself in the over-the-top RC plane-building world. He started off building models on his kitchen floor with limited time and resources, and videos of those early builds took off online. His audience has helped him scale up and pursue increasingly ambitious RC plane designs full-time. To date, he has over 200 videos showcasing massive RC versions of a ViperJet, a Boeing 787-9, and a C-17 Globemaster. Ramy’s most recent build prior to the new Boeing was the world’s largest RC Airbus A380, which came in at a staggering 800 pounds with a 32-foot wingspan.
The entire plane was built out of sections and 3D molded foam and attached together. Image: Ramy RC.
The Boeing 777-9X build started, like others, with a digital 3D model scaled down to 1/7 the size of the actual jet. With the proportions locked in, Ramy and his team then used a CNC mill to cut out separate foam parts for the plane’s fuselage, nose, and wings. Each section was reinforced with carbon fiber sheeting and sprayed with a thin layer of plastic for protection. Long runs of wiring were threaded through the plane to power systems like the wing flaps and landing gear doors. The whole aircraft is propelled by a pair of large electric ducted fans mounted where the real jet’s engines would sit.
Ramy decided to take a ride on top of his plane, Flintstones style. Image: Ramy RC .
Once assembled, Ramy used a remote control to taxi the plane around his outdoor tarmac. To drive home just how absurdly large the thing is, Ramy himself climbed on top and straddled his creation as it rolled around the facility. Once the team felt confident it was airworthy, they painted it white and blue with bold Boeing lettering along its side.
Ramy entrusted the plane’s maiden flight to a surprise guest: filmmaker Tyler Perry. The director is also an avid RC enthusiast and has credited these jumbo models like Ramy’s for helping him conquer his fear of flying. With the controller in his hands, the RC Boeing slowly powered up and its ground wheel started churning. It drove toward the end of the tarmac, then pitched up and went airborne, the buzz of its electric fans heard from the ground. Perry flew the plane for a few passes before bringing it down for a smooth landing worthy of a movie.
Navigating air travel in 2026 is full of annoyances, but few bring more dread than the boarding process. What was once a straightforward exercise has grown increasingly complicated due to the proliferation of groups, zones, and variations of priority-based seating. All of this, studies show, has contributed to boarding times getting gradually longer each year. Boarding in the 1970s reportedly took just 15 minutes. Today, that process often takes up to 40.
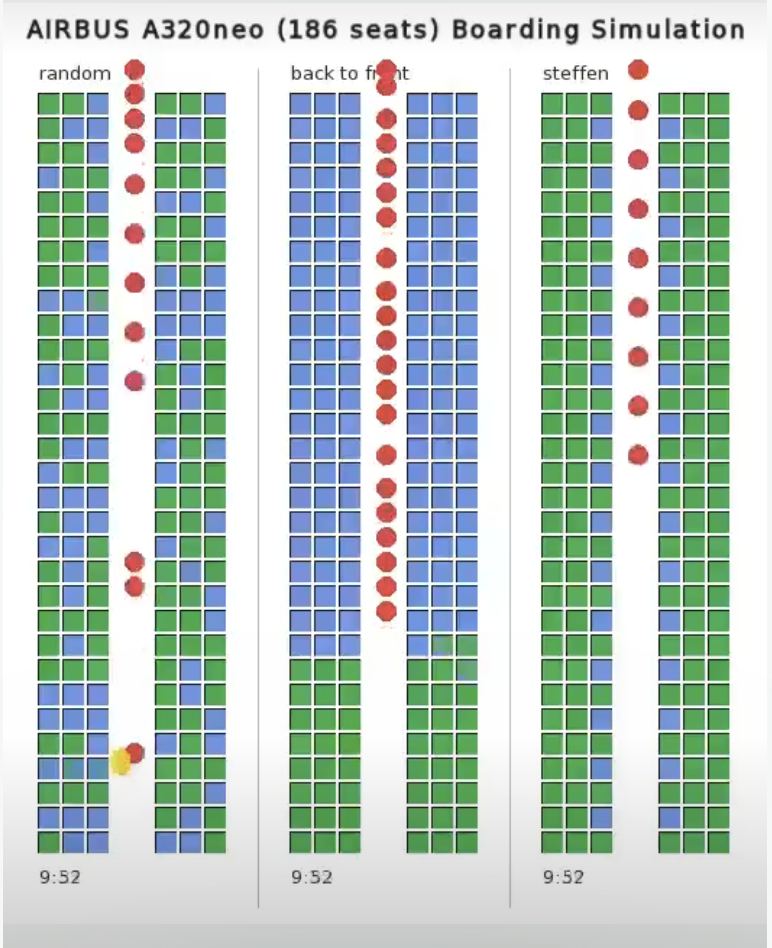
Now, a University of Florida master’s student named Adam Jacobs has built a simulator that clearly visualizes what so many travelers already feel in their gut. Jacobs created a computer model simulating a 186-seat Airbus A320neo and had computer-generated travelers board using three well-documented methods: random, back-to-front, and the lesser-known but academically popular “Steffen method.” Jacobs initially posted the video clip on LinkedIn but it had since gained traction on Instagram and other social platforms.
The video shows passengers, represented as red dots, making their way through the cabin and sitting in their respective seats. The seats appear as blue squares when they are empty but then turn green once a passenger sits down. Each method plays out at the same time side by side for an up-to-moment comparison. The Steffen method, which prioritizes boarding window seats first, concluded boarding after just 11 minutes and and 16 seconds, by far the fastest of the three. Random seating, which is essentially Southwest Airlines offered until recently, completed in 17 minutes and 59 seconds.
Loading back-to-front, however, which many intuitively assume should be the most efficient approach, actually performed far worse than the other two, taking 31 minutes and 15 seconds. That sounds bad, but the real-world experience for most travelers is even worse. Numerous studies have shown that front-to-back loading, more or less the standard approach for most airlines, is even less efficient than back-to-front. Zone-based loading, meanwhile, arguably reduces chaos at the gate but does not produce meaningfully faster boarding times.
“Random boarding performs surprisingly well,” Jacobs writes. “People could get to their destination faster if gate agents just said ‘everyone get on the plane now.’
Despite seeming logical, back-to-front boarding is very slow compared to other methods. Screenshot: Adam Jacobs
Angry at long boarding times? Blame checked bag fees.
So why is something as seemingly simple as loading people onto a plane so complicated and so frustrating? The answer mostly comes down to two things: the battle for overhead bin space and ever-tightening, profit-maximizing by airlines. Boarding used to be straightforward. Most carriers would prioritize first class passengers and those needing extra time, then open the cabin to everyone else. But that began to change around 2008, when airlines started charging for checked bags. Checked bags, like so many things that were once included in the base fare, used to be free.
That seemingly small change had ripple effects. Now passengers wanting to sidestep paying for a checked bag had an incentive to bring their bags as carry-ons. But, as any regular traveler knows, there is rarely ever enough overhead bin space to accommodate a bag for every person. That meant a greater interest from passengers to board early. Airlines, seeing untapped demand there, decided to charge fees to non-first class passengers to board early. That evolved into the group and zones and seemingly endless options of prioritized seating. Passengers, trying to avoid paying a checked-bag fee, ended up paying another fee instead to board early. The resulting complexity of all of that translated to longer board times for everyone.
“Airlines figured out they could make money off of bags,” Embry-Riddle Aeronautical University professor Massoud Bazargan told CNN in 2023. “That killed any efficiency to do faster boarding.”
“Zones reduce congestion at the gate, and they’re how airlines sell priority boarding,” Jacobs said. “That revenue apparently outweighs a few minutes of turnaround time.”
Better ways to board already exist
Realization of the overhead bag bottleneck isn’t new. In fact, that’s exactly the problem being addressed in the Steffen model featured in Jacobs’ simulation video. The concept dates back to 2005 when a University of Nevada astrophysic professor named Jason Steffen reportedly became obsessed with airline boarding after getting stuck within a jet bridge at Seattle International Airport. Steffen took his expertise in computer modelling, which he has previously used to measure exoplanets, and applied it to airplane boarding.
After running hundreds of simulations, it became clear that much of the delay was caused by the aisle getting bogged down as passengers tried to stow their luggage. Steffen tweaked his model to specifically solve for that inefficiency. What followed was a system where passengers with even-numbered window seats board first, followed by those with odd-numbered window seats. Next come passengers with even-numbered middle seats, then odd-numbered middle seats, and so on, with all passengers boarding two at a time.
The process looks bizarre, but it works, at least in theory. By spacing out passengers and ensuring everyone can stow their luggage without blocking the aisle, the “Steffen Method” cuts overall boarding time by up to half in simulations compared to front-to-back boarding.
So if it’s so much faster, why isn’t the Steffen method the standard? Part of the issue is that the model doesn’t really account for families or companions traveling together. People sitting together wouldn’t board together under this method, which would likely cause frustration at the gate. More than that though, the real flaw lies in the reality of human behavior. People (especially cranky travellers) simply don’t behave like tidy mathematical models, a point viewers of Jacobs’ post seemed to intuitively grasp.
“It’s much easier to model things when you ignore basically everything and just pretend everyone it [sic] traveling alone and is of the exact same physical capability,” one user commented on Instagram.
“Would never work outside the simulation,” another user on LinkedIn wrote. “Sorting the people prior boarding would be a nightmare. Forcing families with small children to separate while boarding is inhumane.”
Other models have come along other the years tweaking Steffen’s downsides, but they all eventually come face to face with an arguably bigger roadblock: the airlines. When it comes to charging for boarding the cat’s out of the bag. What began as a niche product for a select few looking to get ahead has turned into a booming business. And with the average plane today fuller and more densely packed than ever before, travelers arguably have more incentive than ever to pay a few extra bucks to jump ahead, even if that creates a worse overall experience for everyone.
The science of airplane boarding, in other words, has less to do with models and efficiency and more to do with old-fashioned greed.
An intrepid sub-sea robot recently dove nearly 1.5 miles below the Mediterranean Sea off the coast of southern France. The remotely operated vehicle (ROV) went down to examine the wreckage of a merchant ship that dates back to the 16th century. There, it found hundreds of ornately decorated ceramics, jars, and jugs strewn across the sand. From the boat, a French navy sailor remotely controlling the robot plucked these treasures up ever so gently with the robot’s pincers. Despite centuries of ocean burial, the artifacts still maintained the bold blue and yellow geometric designs they had when the ship mysteriously capsized. But the ship’s discovery was mostly due to luck, and its current exploration is only made possible by modern advances in robotics.
Archaeologists are officially calling the site Camarat 4. It sits roughly 30 miles off the coast of Ramatuelle, but French authorities are keeping the exact location secret to prevent unauthorized visitors from nosing around. Camarat 4 was initially discovered during a routine French navy survey of the region last year, and the wreckage is now considered the deepest shipwreck in French territorial waters. The record for the deepest shipwreck ever found belongs to the USS Samuel B. Roberts. The navy vessel lies about four miles deep off the coast of the Philippines, according to the Guinness Book of World Records.
But reaching 1.5 miles isn’t a day at the beach either. To get down there and explore the mysterious vessel, archaeologists worked alongside the navy and reportedly used the largest robot in their arsenal.The robot is capable of diving down to 8,202 feet and was equipped with several cameras and a pair of pincers capable of grabbing objects. When the robot was deployed, it reportedly took a full hour just to reach the sea floor.
When it did, the cameras revealed the shipwreck in greater detail than ever before. They captured 66,974 images, snapping pictures at a rapid clip of eight photos per second. Those images clearly showed the ship’s six cannons, an anchor, and 12 cauldrons. Strewn across the seabed nearby were a small building’s worth of ceramics, one of which had the first three Greek letters of Jesus Christ’s name inscribed on it.
Archaeologists say that the cannons and the cargo reinforce the idea that this was a merchant ship. Though researchers have traced its origins to somewhere in northern Italy, it remains entirely unclear where its final destination was or what caused it to meet its watery grave.
All of the photos taken by the robot will help create a 3D model of the wreckage, which could aid further research. The robot was also able to grab and recover three pitchers and a plate from the site, though it’s unclear how many others may have been broken in the process. Using a modern robot’s giant pincers to grab nearly 500-year-old, decaying artisan works isn’t exactly a foolproof recovery method.
Exploring the sunken Italian ship isn’t just a matter of mere curiosity. Archaeologists involved in the excavation say that detailed historical records about Mediterranean merchant ships from this period are scarce. Knowing more about why this ship was there and where it was going could shed greater light on trade routes of the time.
Ironically, the sunken Italian ship’s sheer inaccessibility is also what makes it such a valuable site to explore. Its depth and remoteness mean it has been completely untouched by looters or previous explorers. Even so, modern humanity has managed to leave its mark on the ancient vessel in the form of garbage. Beer cans, plastic containers, and old fishing nets were all spotted near the cannons and ceramics.
Trash aside, the Camarat 4 expedition highlights the promise of future deep-sea exploration made possible by increasingly capable robotics, some of which are being designed to operate autonomously. By diving deeper than ever before, archaeologists will have the tools to explore mysteries that would otherwise have been left to rot in the ocean’s unforgiving darkness.
Dangerous, frontline firefighting jobs may get a bit safer thanks to new heat-sensing sensors designed by NASA. The sensors are made from commonly available household materials, and attach to the bulldozers firefighters use to clear vegetation and brush in a fire’s immediate path, triggering an alarm when temperatures reach extremely dangerous levels.
Knowing when a fire is hot might sound obvious, but many new so-called fire dozers are being outfitted with enclosures to protect their operators from the flames. That’s a welcome change, but it also reduces the operator’s ability to gauge the surrounding heat. These new sensors help solve that problem, protecting the driver and helping prevent the dozers from sustaining too much damage.
The sensor setup is simple by design. It consists of a standard thermocouple similar to those found in a home oven, which is then wired to an LED light in the dozer’s cabin. If the light starts blinking, it’s time to get out of Dodge.
The entire system is powered by something that’s probably laying around your house: AA batteries. Using a simple power source like this is part of an attempt to make every aspect of the design affordable and accessible. University of Alabama, Huntsville research scientist Ryan Wade emphasized that point in a NASA blog post. He explained that during a recent trial installing the sensor in a fire dozer, his team realized that they were missing a part. Rather than waiting to hear back from NASA and having a custom piece shipped to them, they simply walked down the street to a hardware store and solved the problem.
NASA Wildland Fires Program science integration manager Jennifer Fowler holds an LED light on the dashboard of a fire dozer belonging to the Alabama Forestry Commission (AFC). The LED light is connected to a thermal sensor mounted in the window of the dozer, which turns the light on when the radiant heat from a nearby fire reaches a dangerous threshold. FireSense scientists have been working with the AFC to develop and install these thermal sensors onto these dozers, which they showcased during a stakeholder event on April 23-24, 2026 at the Solon Dixon Forestry Education Center in Andalusia, Alabama. Image: NASA/Milan Loiacono.
“NASA’s expertise in this case comes not in the novelty of the instrument itself, but in figuring out how to solve the problem quickly and integrate that technology into their existing system,” Wade said.
That flexibility is what makes the approach so valuable for firefighters. Alabama Forestry Commission fire analyst Ethan Barrett says the devices so far work “exactly as intended.” In Alabama, at least, officials are planning to outfit their entire dozer fleet with the sensors. The sensor system was developed by NASA’s FireSense project, whose interest in it was twofold. The sensors will more immediately help firefighters on the ground as fire season approaches, but the data they collect will also prove invaluable for future research. By placing sensors in the dozers, NASA will gather reams of data about fire strength and intensity straight from the front lines.
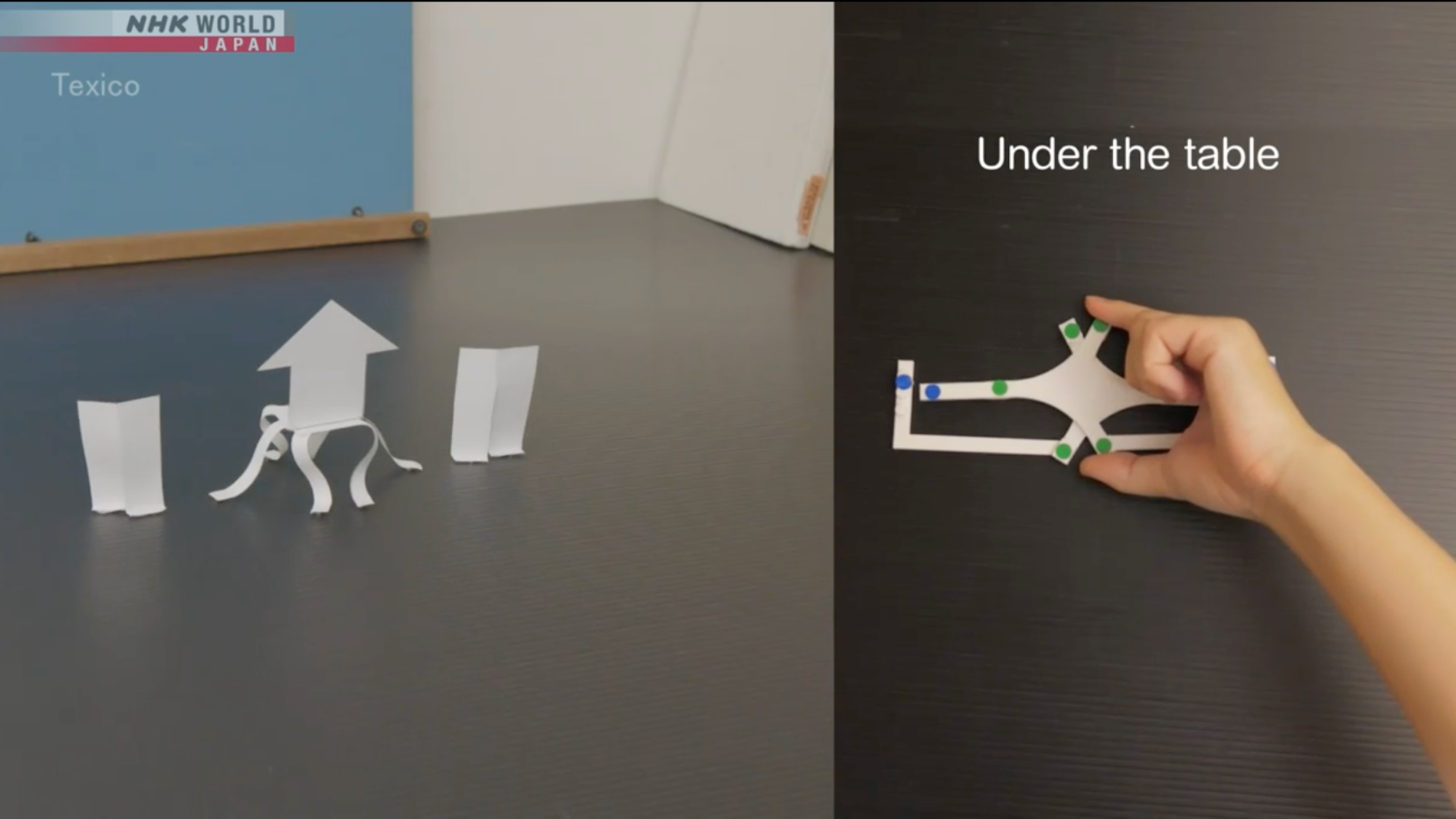
Parents around the world are responding to growing research showing that excessive screen time, especially for young children, may have negative cognitive effects. But what happens when a well-meaning parent wants to introduce their child to subjects intrinsically linked to screens, like computer programming? A new learning series from Japanese public broadcaster NHK called Texico aims to help solve that dilemma by using paper, plastic toys, and everyday objects to break down the core concepts and strategies essential to programming.
Each episode in the series runs about 11 minutes and focuses on key concepts including analysis, combination, abstraction, and simulation. The goal, NHK says, is to help children “learn the principles of programming without even touching a computer.”
Each 11 minute episode breaks down some of the essential strategies needed for programming. Image: Texico.
‘If you think hard enough, you can see the underlying logic,’
In one episode, a toy train on a plastic track approaches a lowered rail crossing. Viewers are asked to visualize what will happen when the train makes contact with the barrier. In this case, both the train and the lowered rail continue moving forward.
The next segment complicates the scenario: the track now forms a circle, with the train, rail, and a wooden triangle block all positioned at different points. When the rail moves, so does the block. Viewers are asked to recall what happened in the previous example and apply that logic to the new configuration, essentially practicing the kind of mental simulation that underlies real programming work.
Another episode teaches foundational logic by asking viewers to tear a sheet of paper into nine pieces. A teacher then selects one piece and instructs the viewer to write a number from one to nine and place it face down. The viewer then writes the remaining numbers on the other pieces, also face down, so the teacher can’t see it. The teacher then somehow correctly guesses which piece holds which number.
But the trick isn’t magic. Instead, it has everything to do with the geometry of tearing paper. It’s revealed that the first piece the teacher selected was the center of the sheet. When paper is torn into nine equal pieces, the center piece is the only one without any straight edges. So when the teacher went to identify it, they simply looked for the piece that didn’t look like the others.
It’s a simple but elegant demonstration of the kind of pattern recognition that programmers rely on constantly.
“If you think hard enough, you can see the underlying logic,” a voice in the video says, followed by the slightly creepy musical mantra “Texico, Texico, Texico.”
The train track can mimic what is going on inside the brain when doing real programming. Image: Texico.
The pull away from screens
Offline approaches to teaching computer concepts provide a way for newcomers of all ages interested in coding to get their feet wet without having to deal with distracting screens. For many, that’s a welcome reprieve. A recent YouGov poll found that more than half (57 percent) of adults in the United States spend at least five hours per day looking at screens. All that time starting into the digital glow has been shown to interfere with sleep and, in some cases, even contribute to anxiety and other mental health issues.
Screenless learning could also prove popular as parents and school districts push back against what many now see as an overreliance on screens. More than 35 states have enacted policies limiting smartphone use in classrooms. Districts in California and Oregon have recently gone further, adopting rules that restrict student use of laptops and tablets and prioritize pen and paper. Should that trend spread, it would mark a stark departure from the past two decades, during which “EdTech” was enthusiastically embraced and widely deployed in classrooms across the country.
“We are prioritizing developmentally appropriate learning during the most critical period for language, social, and cognitive development,” Jeanne Grazioli, a superintendent in a Southern Oregon schools district said after they moved to reduce screen time.
And while the debate over screens is far from settled, there is growing evidence that introducing concepts through analog methods pays dividends later on. In his recent book The Digital Delusion, neuroscientist and educator Dr. Jared Cooney Horvath points to research suggesting that students who learn to write by hand retain an advantage over those who move straight to typing, despite the fact handwriting has become increasingly less common in daily adult life.
”Many people believe that thinking happens entirely in the brain, as if we’re just gray matter hitching a rise inside a body,” Horvath writes. “But this misses something essential: we don’t merely have bodies—we are bodies. Learning doesn’t arise from the brain alone, it emerges from the rhythms, movements, and sensations of our entire physical selves.”
“Put simply, handwriting builds a foundation that typing cannot,” he adds.
Something similar may be at work when children learn programming basics through analog tools. And even if future research doesn’t bear that out conclusively, Texico offers something valuable on its own terms: a set of refreshing, screen-free puzzles that challenge young learners (and at least one adult tech writer) to flex their critical thinking skills.
Space is undeniably incredible—but the food options up there, not so much. Though cosmic cuisine has come a long way from the days of sucking liver and beef paste out of a tube in the 1960s, the options on the intergalactic menu are still limited. And with astronauts preparing to spend longer periods in zero gravity following the recent Artemis II mission, there’s never been a greater need for a wider variety of shelf-stable options to break up the dietary monotony. The team behind a new study published in the journal ACS Food Science & Technology have found a partial solution: a customizable fortified beverage made from nanoemulsions.
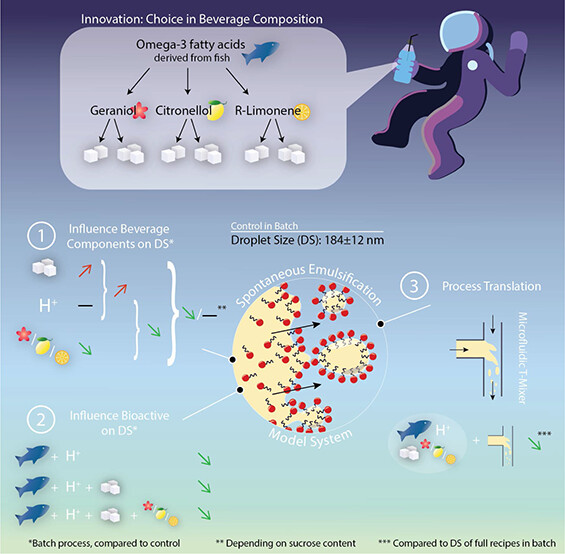
The roughly soda can-sized drink comes in various flavors and sweetness levels that astronauts can choose from. It is also enriched with omega-3 fatty acids, which are largely absent from astronauts’ normal daily diet. The emulsions are possible both on Earth and in zero gravity, which means astronauts could pick and choose which drink they want at a moment’s notice and based on their preferences or cravings. By sipping on these drinks, astronauts can break up the monotony, while simultaneously protecting their bodies against the hazards of space.
The only catch: the current version has a flat-soda consistency and a slightly sweet, fishy flavor, which isn’t exactly a crowd-pleaser. But after spending roughly three years getting to Mars, any way to shake things up (fishy or not) probably has its upside.
Spicing up space food
Many astronauts understandably get pretty tired of their rotating menu of slightly gooey and bland food. It can be so monotonous that many may fail to fulfil their daily calorie goals. Some astronauts even experience what researchers call space anorexia. Not getting proper nutrition poses risks anywhere, but it’s doubly so in space where higher reaction levels and muscle mass loss from microgravity take a toll. The longer an astronaut spends in space, the more these issues get amplified.
Currently, space agencies address the microgravity issue by having their astronauts engage in high resistance exercises to keep their muscles from atrophying. But that only goes so far. The chemist working on the new beverage wanted to see if they could find a way to subtly add nutrients into an astronaut’s diet that could help mitigate space’s harmful effects. They chose to focus on omega 3 fatty acids because past research has shown they may help in bolstering protection against space radiation and reportedly increase bone formation rate.
This graphic breaks down how aromas, fruit acids and bioactives interact with each other during the emulsion process. Image: ACS Food Science & Technology.
Space drink: floral, sugary, and a hint of fish oil
To actually get those nutrients into an astronaut’s body, the team turned to a concept already well established here on Earth: the fortified drink. A fortified drink is essentially any beverage with nutrients added that weren’t originally present. The practice dates back at least to the 1920s in the United States, when vitamin D was added to milk to help combat rickets. Today, nutrients such as vitamins, minerals, or fatty acids are commonly added to a variety of consumer drinks, from orange juice and energy drinks to plant-based milks.
In this case, the team used a process that combines water-soluble ingredients like sugar with omega-3 fatty acids, which are oil-soluble. The ingredients are then blended into a stable mixture to create the beverage.
After tinkering with a variety of sugars, fats, acids, and flavorings, they settled on six drink recipes with two sweetness levels (medium or high) and three flavor profiles reminiscent of rose, orange blossom, and floral citrus. Each serving is 11 fluid ounces, roughly the same size as a standard soda, and provides up to one-third of an astronaut’s recommended daily omega-3 fatty acid intake.
Though this study focused on omega-3s specifically, there’s not really anything stopping future versions from swapping in whatever nutrient an astronaut needs most. The overarching idea is that astronauts could pick their preferred flavor profile, sweetness level, and possibly even their nutrients on the fly, right there in the moment. Think of it as a much more limited, slightly fish-forward version of Coca-Cola’s option-abounding Freestyle fountain machine.
The emulsion drink isn’t quite ready for space missions yet. The researchers want to do more testing to improve the taste. It’s also not entirely clear how prolonged time spent hurling through space could impact beverage’s shelf life. And even when those kinks are worked out, the drink’s creators make clear it isn’t intended to come across as some wonder concoction. Instead, in a statement, paper co-author Volker Hessel called the fortified drinks “one small piece in the big puzzle of human space exploration.”
When most American travelers conjure up the image of a bus, many words come to mind but fast almost certainly isn’t one of them. An ambitious proposal in California wants to change that by exploring the idea of buses operating between 100-140 mph.
Though buses function as an integral means of affordable transit for millions of people, they certainly aren’t the mode of travel for anyone in a hurry. Long-distance operators like Greyhound, traveling from city to city, typically max out at 65 miles per hour, and frequent stops mean a bumpy trip aboard one can easily take twice as long as the same journey by car.
But what if that same bus could reach speeds rivaling a train? That’s an idea currently under consideration by California’s Department of Transportation (Caltrans), which recently held a webinar discussing the feasibility of a “freeway bus service”—a concept envisioning a new fleet of specialized buses traveling down an interstate at speeds approaching 140 miles per hour. These so-called “bullet buses” would have their own dedicated high-speed lanes and could theoretically transport dozens of passengers from San Francisco to Los Angeles in around three hours and connect smaller rural communities along the way. That same trip on a long-haul bus today takes somewhere between seven and nine hours.
In an email to Popular Science, Caltrans emphasized that its interest in the buses remains very much in the exploratory phase. And while building out such a system would require significant time and financial investment, the agency describes it as “conceptually feasible.” But are these speedy buses actually a good idea and would they even work? In a vast graveyard of failed public transit proposals, could bullet buses buck the trend? And even if they are built, would anyone want to ride in one?
Bullet buses would require sleek new vehicles and wider roads
Caltrans detailed the prospect of an interstate high-speed bus system in an 18-page report released last year. In it, they envision a dedicated high-speed bus lane connecting cities and rural areas. This multi-purpose lane could serve local routes (stopping every two to four miles), express routes (stopping only at interchanges), or long-distance routes (traveling between cities). The concept essentially applies the tiered service model already used in subway and rail systems to long-distance buses. In theory, this additional transit option would simultaneously put fewer cars on highways and reduce the burden on the state’s still-developing high-speed rail network.
Construction site for the California High-Speed Rail Project in Fresno, California, on August 7, 2025. The California High-Speed Rail Authority faces years of delays, missed deadlines, and rising costs. Image: Michael Yanow/NurPhoto via Getty Images Michael Yanow
That’s the hope, at least. Getting there would require fundamental changes to both the design of buses and freeway infrastructure. Current freeways are typically only engineered to support speeds of only up to 85 miles per hour. And while plenty of speed demons exceed those limits daily, the caps aren’t just theoretical; they directly shape design considerations like a road’s curve radius and camber, the slight banking that helps vehicles stay stable through turns.
In other words, vehicles traveling at 140 mph on current roads would have far less ability to safely navigate what lies ahead and would struggle to maintain control. Those risks, the report rather drably acknowledges, would make any collision “catastrophic” at those speeds “given the low survivability.” Seatbelt use, they add, would be mandatory.
All of this means a high-speed freeway bus service would likely require roads redesigned from the ground up. The bus lanes alone, the report notes, would need to be at least 12 feet wide, with an additional 12 feet for both the inside and outside highway shoulders. Entry and exit ramps would also need to be significantly longer to accommodate the higher speeds.
Then there’s the actual buses. Simply adding a turbocharger to the currently in-service bus won’t cut it. These bullet buses would similarly require entirely new design. This updated approach would have to consider factors like drag, turbulence, and airflow, with the exterior chassis constructed in a shape far more aerodynamically efficient than the boxy brutes on the road today. Ironically, these sleeker more curved designs would likely look similar to bullet trains. Carbon fiber would also probably feature prominently to reduce overall weight.
But the bus body isn’t the only thing that would need an overhaul. The report notes that the brake systems currently used wouldn’t work. Those brakes generally perform well at speeds up to 88 miles per hour, but failure rates rise substantially above 90 mph. And bullet buses would travel considerably faster than that. They would also need new specialized tires capable of withstanding the additional heat and stress that are primary drivers of blowouts.
Bus operators would also look different. Though a human would likely still be needed to board passengers and handle local road driving, the report suggests that travel on high-speed lanes would be handled autonomously. Human drivers, the argument goes, simply don’t have fast enough reaction times to safely operate these bullet buses. And while self-driving vehicles are an increasingly common sight on US roads (and even some Texas highways) none of those systems currently operate anywhere close to the speeds bullet buses would need to reach.
“Pushing a bus to 100–140 mph requires a re-engineering of the vehicle: high-speed rated tires, extremely powerful brakes, active suspension and stability control, aerodynamic streamlining, lightweight but strong construction, and robust safety systems,” the Caltrans report notes.
Brazil’s Bus Rapid Transport doesn’t do 140mph, but does transport millions of people. Image: Getty Images Joa Souza
Turning all that into reality, especially in an environment where new mass transit efforts notoriously face backlogs and delays, will be challenging. But some experts see real potential upside. DePaul University Professor Joseph Schwieterman, an expert in transportation and urban planning, told Popular Science these fast trains could potentially fill in certain gaps where high speed rail falls short. Buses, operating on roads with wheels, can intimately handle sharper turns easier than trains operating on a fixed track. Buses, even those operating at high speeds, can also accelerate and decelerate much easier and faster than rail. Those factors combined with the ability to operate on already existing road means the buses could potentially get far more passengers closer to to their destinations than spread apart rail stations
“The concept is intriguing because fast-running buses could complement high-speed rail service, so it is not an “either/or” proposition,” Schwieterman said. “Fast buses are likely to eventually be part of the mobility ecosystem. But the lack of real-world examples of high-speed buses in operation makes California’s high-profile discussion about the technology seem premature.”
Schwieterman also expressed some skepticism over whether or not the average traveller would necessarily embrace the idea of strapping into an ultra fast bus with open arms. Those with a possibility toward car sickness may also view these travel methods as something out of a nightmare.
“The evidence is clear that many intercity travelers are reticent to travel by bus on trips longer than three hours,” he said. “The interiors of buses could be configured to support first-class service, but there would still be much uncertainty about the traveler response.”
“The effects of swaying over curves could be particularly troublesome,” he added
International attempts at faster buses
The fast train network proposed in California draws some inspiration from a handful of international alternative bus systems, but none have come close to hitting 140 mph over prolonged periods of time.
In the 1970s, the Brazilian city of Curitiba built what it calls Bus Rapid Transit (BRT), a system that uses dedicated bus lanes to transport large groups of passengers long distances. Though these buses only ever approach a maximum of around 60 miles per hour, the dedicated lane means they function similarly to an above-ground subway line. Today, more than 2.5 million passengers across 200 cities use it daily.
Around that same time, halfway across the planet, engineers in Adelaide, South Australia, constructed the “O-Bahn,” a series of high-speed, guided buses that run on tracks. The unusual design essentially takes a standard commuter bus and plops it atop dedicated concrete rails normally intended for trains. This hybrid approach means the buses can cover long stretches quickly without any traffic, and then leave the tracks and use standard wheels to drive on regular roads for more local routes.
Adelaide’s unique Obahn busway is 12km (7.5mi) long and incorporates 3 interchange stations. Image: Getty Images BeyondImages
In terms of pure speed though, the closest example comes close to what Caltrans envisions in the “Superbus” from the Netherlands. This one-off prototype looks like a cross between a bus, a Formula One car, and a rocket ship. Its speed reflected that. In tests, the all-electric, 23-person black tube could reportedly reach 155 miles per hour. Its sleek, racing-inspired design had 16 gull-wing doors and a drag coefficient similar to that of a super car. But even though the Superbus proved it was at least conceptually possible to move bus quantities of people at high speeds, the project fizzled out because it would have required entirely new “super lane” roadways to be built out for it. Today, the lone superbus gathers dust in a University of Delft warehouse.
The bullet bus has a bumpy road toward reality
It’s still unclear how far California wants to pursue its high-speed bus vision. In an email, Caltrans told Popular Science it’s currently “evaluating what would be required before determining whether future testing or implementation” is appropriate. But technical feasibility is only part of the battle. Getting public support for the bus system would also likely face an uphill battle, especially since the state’s now decades-long plan to build a high-speed rail network connecting Los Angeles to San Francisco is still nowhere near completion. That route, once expected to cost $33 billion and be finished by 2020, now has a price tag exceeding $100 billion for a substantially shorter route.
Schwieterman, though optimistic about the concept of a high-speed bus network, said engineers need to slow down and iron out many more specifics before plowing forward.
“I believe the idea should be quietly dropped until California or another state tests the workability of fast buses in a controlled environment,” Schwieterman said. “Starting with, say, a 50-mile route where buses reach 100 mph and ramping up from there would be more practical than engaging the public now in a debate about ultra-fast buses on long-distance routes.”
It seems like every week there’s another example of a new robot modeled after a real creature in the animal kingdom. From dogs and bats, to roaches and desert lizards, the natural world is a constant source of inspiration for engineers. But while most robotics researchers use animals as a base for their machine’s movement, an ambitious team of Duke University engineers set out to make something entirely new: a robot whose form factor and movement aren’t derived from biology, but from the universe’s underlying physics.
Say hello to Argus, a 20-legged, blob-looking robot capable of seeing in all directions at the same time and able to move almost instantly in any direction. The amorphous-looking sphere has no top or bottom, no left or right, and will keep trekking through sand, dirt, and gravel even when some of its legs are destroyed. It can also use its many legs to shimmy up narrow walls, a move similar to a wall jump in “Super Mario.”
The engineers behind Argus say their intriguing, if not slightly terrifying, creation isn’t just another incremental step forward in robotics. It’s the first member of a totally new category of “dynamically symmetric machines.” The findings were published this week in the journal Science Robotics.
“Watching Argus move is unlike watching any other robot we’ve worked with,” study co-author and Duke PhD student Jiaxun Liu said in a statement . “The first time we saw it navigate among trees and rough terrain, even under heavy collisions, we knew this was something different.”
Biological tradeoffs
Though somewhat human-looking, upright bipedal robots from companies like Figure and Tesla are all the rage these days, engineers have long looked to other animals to inspire their machines, because animals are simply better than Homo sapiens at certain tasks. Dogs and other quadrupeds are more agile, bats can fly, and bugs can scurry into hard-to-reach places.
However, at least in terms of movement, each of the pluses of these specific animals has also come with some minuses. Dogs and other quadrupeds are remarkably fast and nimble when moving forwards, but ask them to replicate that movement when moving backwards and you’re in for a problem.
With those inherent biological tradeoffs in mind, the team at Duke’s General Robotics Lab set out to make something completely different. Taking inspiration from underlying physics, they wanted to see if they could make a robot based around “dynamic symmetry,” which they define as the ability to generate forces and acceleration with uniform magnitude in all directions.
In other words, such a robot would take the idea of left or right and up and down and throw them out the window. Instead, it would be capable of moving in any direction, at any time, without any privilege given to one particular direction. The goal was essentially to build possibly the world’s first “omnidirectional” robot.
Argus keeps on coming—even when you break its legs
The design team eventually settled on a spherical core, or base, with a bunch of legs sticking out of it. They made multiple versions in a simulation, one with as few as eight legs and another with as many as 40. Eventually they settled on an even 20 legs for the physical build. Each of those legs is tipped with a camera that serves as one of Argus’ many eyes. Fitting, then, that it’s named after a many-eyed giant in Greek mythology. The researchers describe Argus as visually similar to a sea urchin, but even that’s selling it short. It doesn’t really look like anything in nature, which makes its uncanny movement in real-world testing all the more unsettling.
In testing, Argus could move in any direction just as quickly and comfortably as any other. The upside of that is that the blob is actually quite adaptable to different terrain despite its unusual appearance. It can easily traverse forest, wet surfaces, and sand, and could climb over certain obstacles. Argus’ ability to rapidly redistribute its weight also meant that it excelled at recovering when researchers tried to shove it off course. While Argus isn’t the first robot to right itself after getting pummeled by a researcher, what makes it unique is that it can redistribute its weight even if some of its legs get damaged or fail altogether.
In other words, you can chop off Argus’ legs and it will just keep coming.
Argus joins a family of DARPA-backed robots
The Duke researchers frame their interest in building this new category of machine as primarily motivated by pushing the boundaries of what’s possible in mechanical science. Still, it’s hard not to ignore the researchers’ most notable funder: the Pentagon’s Defense Advanced Research Projects Agency. Known for incubating some of the military’s most notorious research and development projects, DARPA is responsible for everything from Boston Dynamics’ beef Atlas humanoid to a massive, experimental manta ray inspired uncrewed underwater vehicle.
So, while it’s still not clear what exactly Argus will ever be used for, paper coauthor and postdoctoral researcher at Duke’s General Robotics Lab Boxi Xia says the experimentation and exploration was success in itself.
“Argus is an existence proof,” Xia said in a statement. “It shows that designing for dynamic symmetry isn’t just a theoretical curiosity. It produces a robot you can deploy in the wild, on uneven ground and in clutter, even in low-gravity settings. It changes what’s possible.”